-
基本資訊
- 作者: 黃正民
-
數位影像處理_黃正民_單元六 影像表示與描述_Part 1 影像表示與描述的基本概念
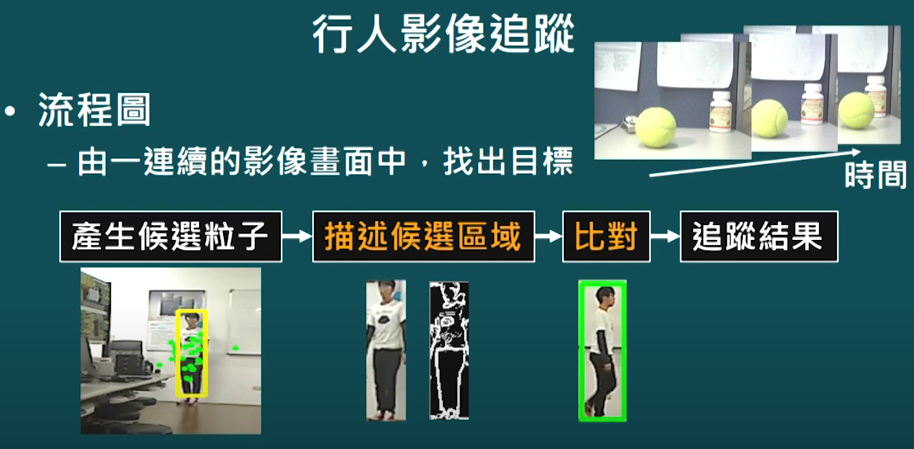
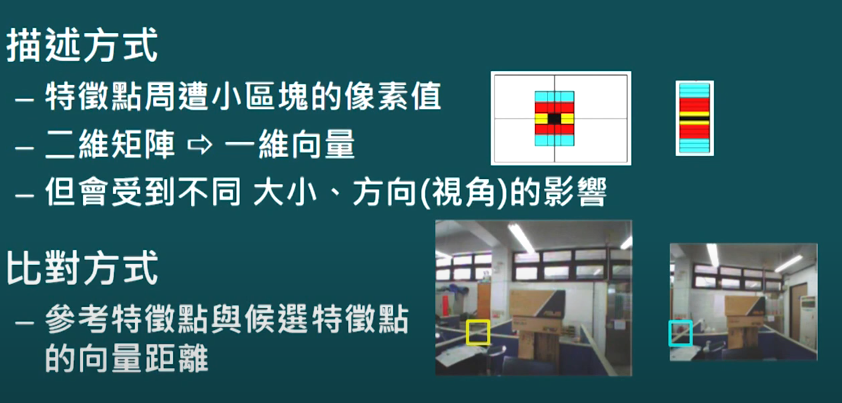
- 機器視覺的圖形識別或電腦視覺之應用,常會先用從影像中擷取出有用的物件或特徵 表示與描述
- 直接用物件的區塊內容 難度高且沒有效率,要用簡單的表示式來表示物件,最後再以數值來描述物件
- 表示(representation)
- 用簡單的圖形來代替複雜的圖形
- 描述(description)
- 將簡單的圖形用數值描述出來,做為分析、辨識的依據
- 影像物件特徵
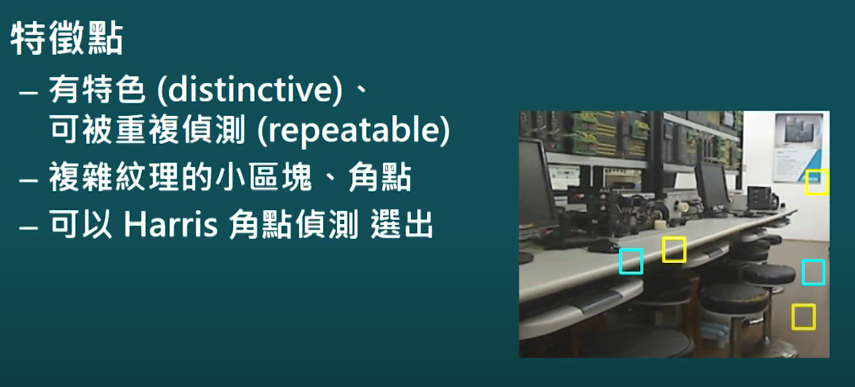
- 特徵點
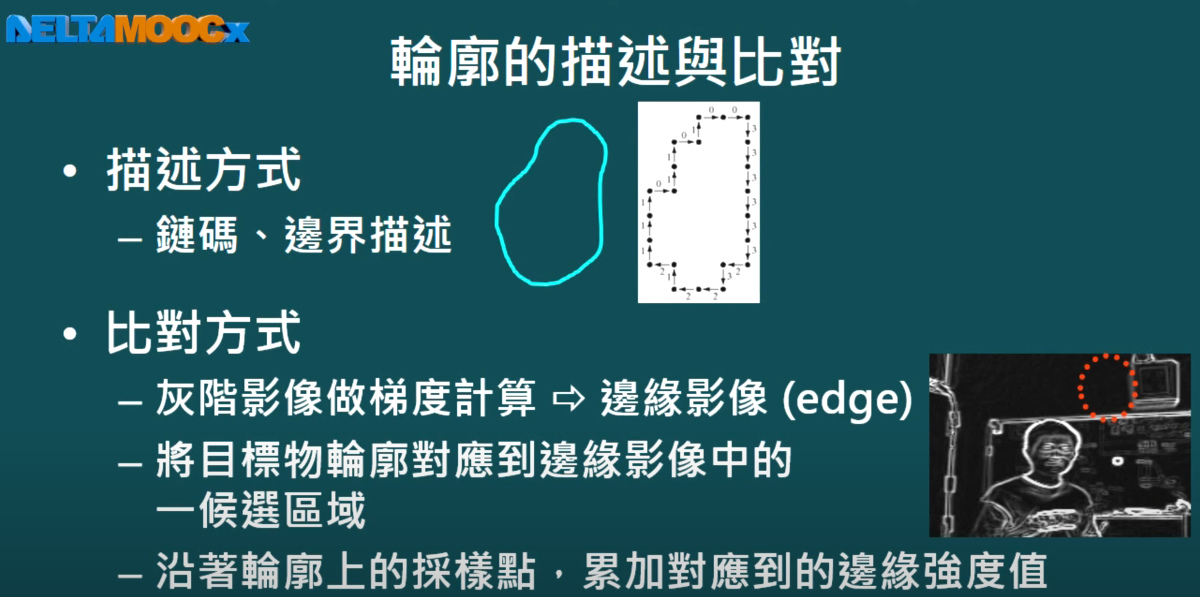
- 輪廓外形
- 結構關係
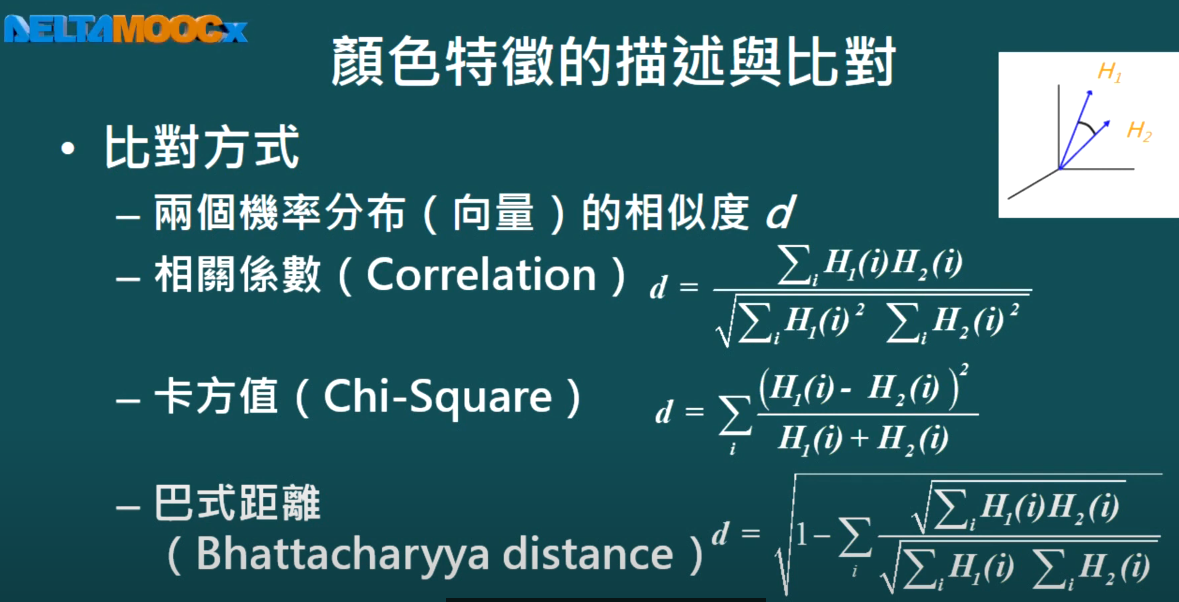
- 顏色
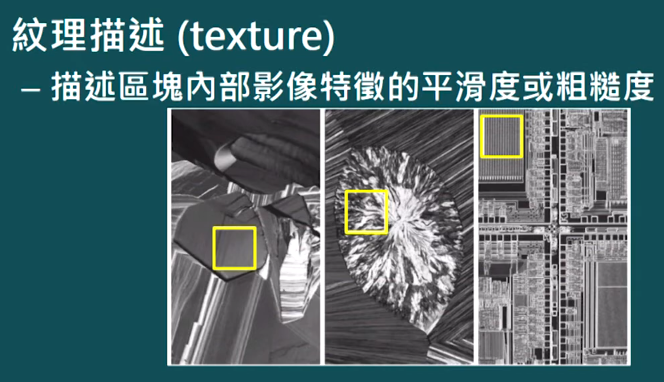
- 紋理
- 物件表示
- 外形表示(boundaryrepresentation)
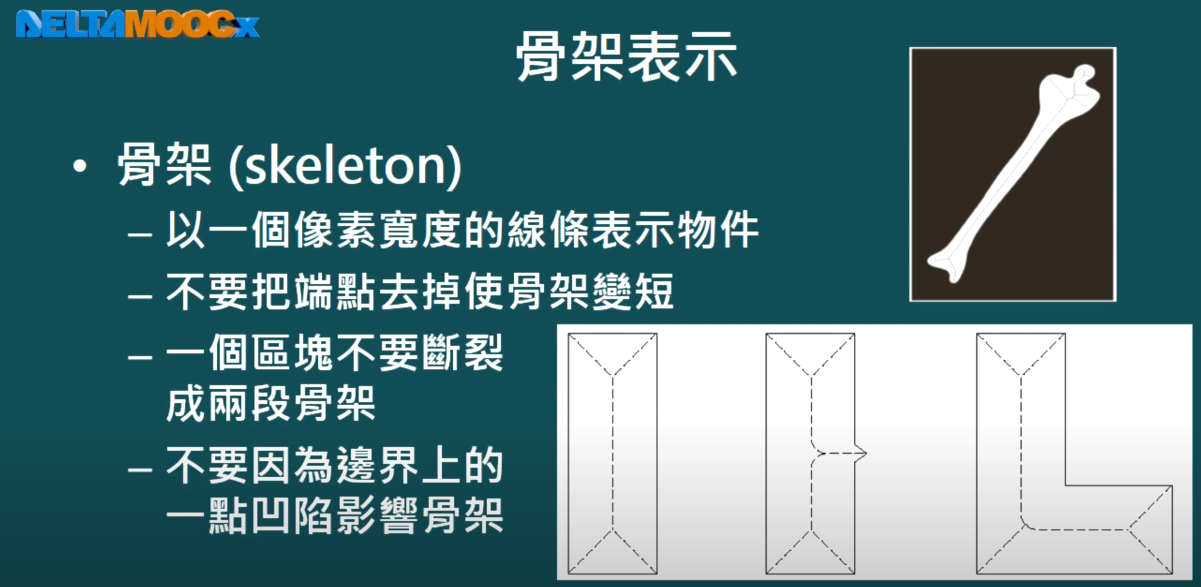
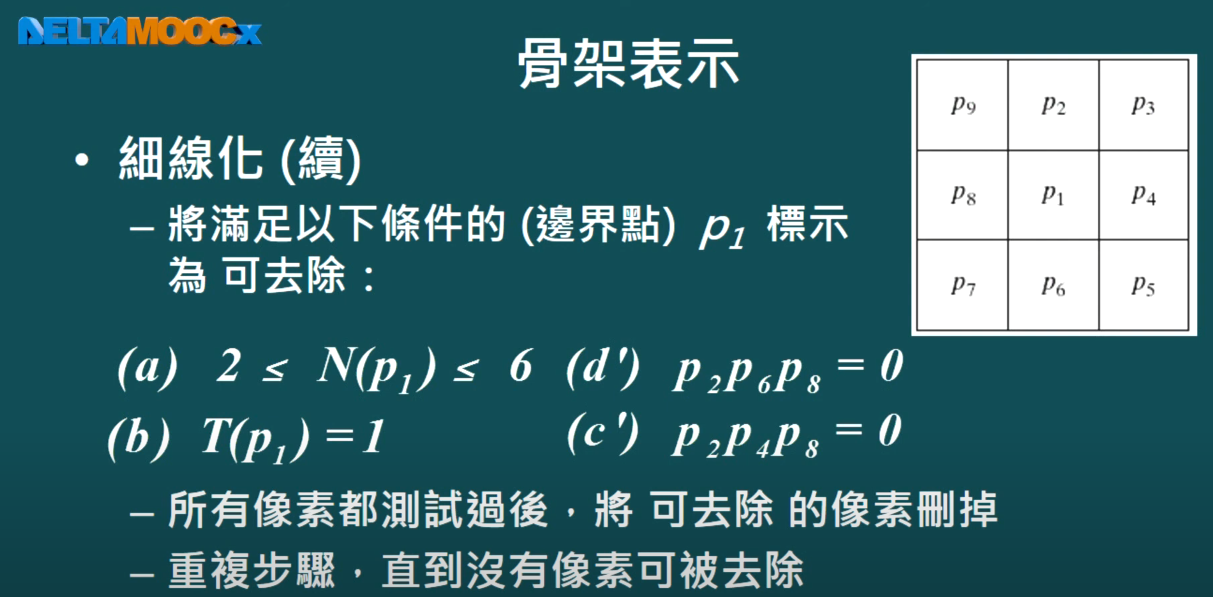
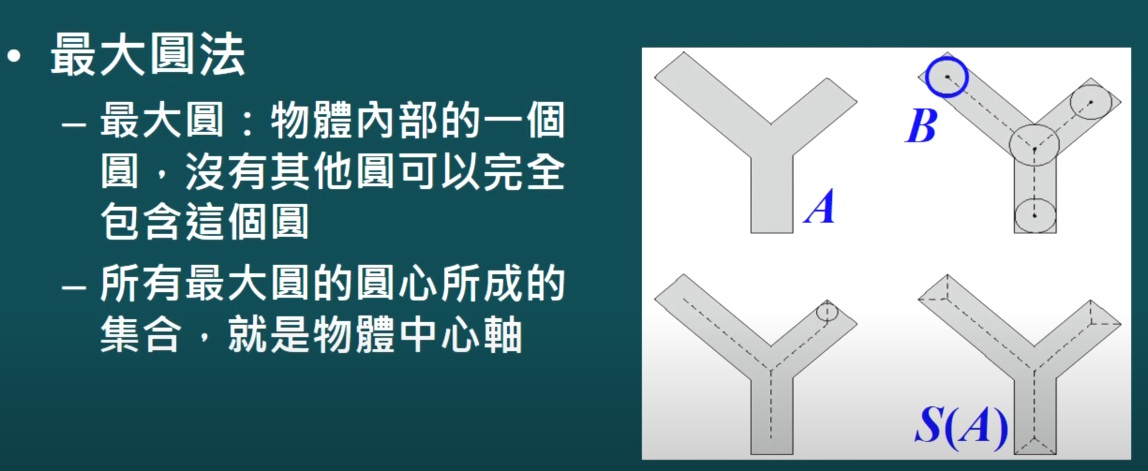
- 骨架表示(skeletonrepresentation)
- 物件描述
- 外形描述(boundarydescription)
- 區域描述(regiondescription)
- 不變性影像物件特徵
- 物件與相機之間可能有不同的距離及方向
- 同一種物件因為擺置的遠近及方向的不同,有不同的物件影像,不能就認為是不同的物件
- 物件的表示與描述與物件的大小、位置、及方向無關
-
數位影像處理_黃正民_單元六 影像表示與描述_Part 2 影像物件的外形表示(上)
- 外形表示(boundaryrepresentation)
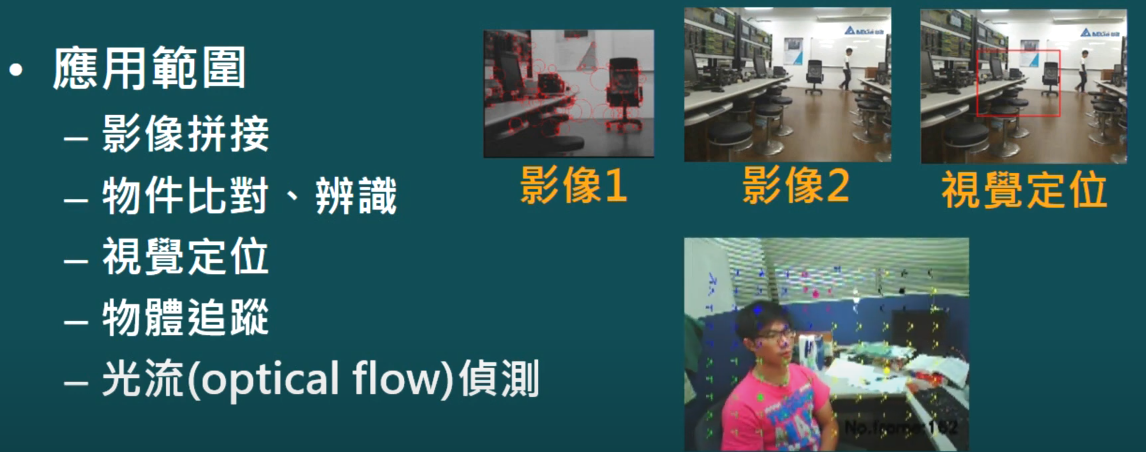
- 在物件比對、確認、及辨識上常被使用
- 被發展出來的表示式也最多
- 鏈碼表示、多邊形表示、一維函數表示、邊界分段表示
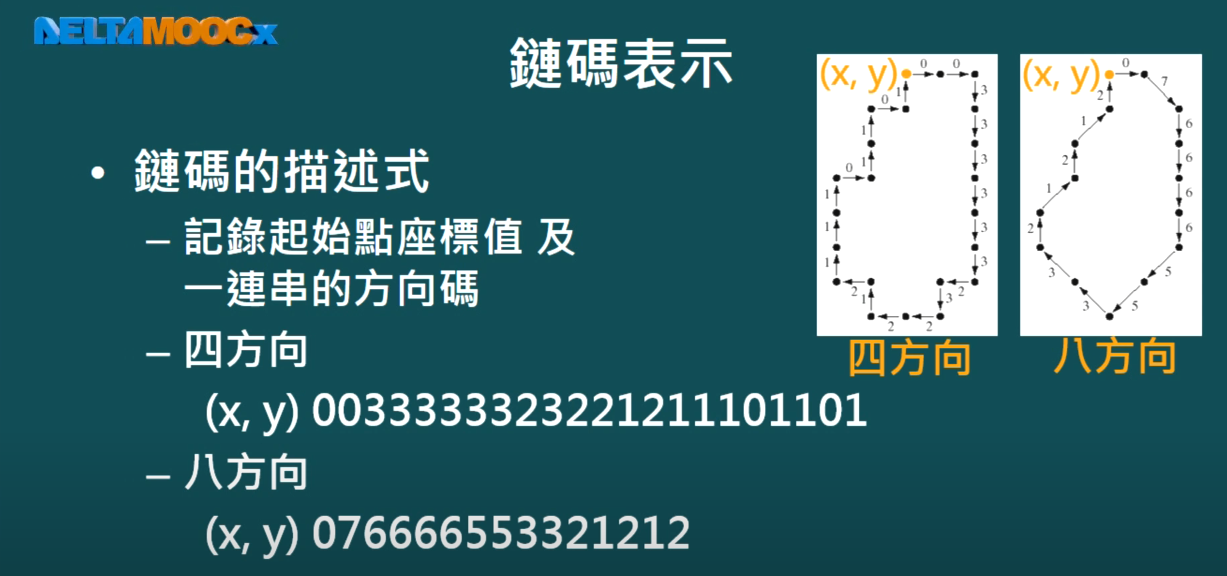
- 鏈碼表示
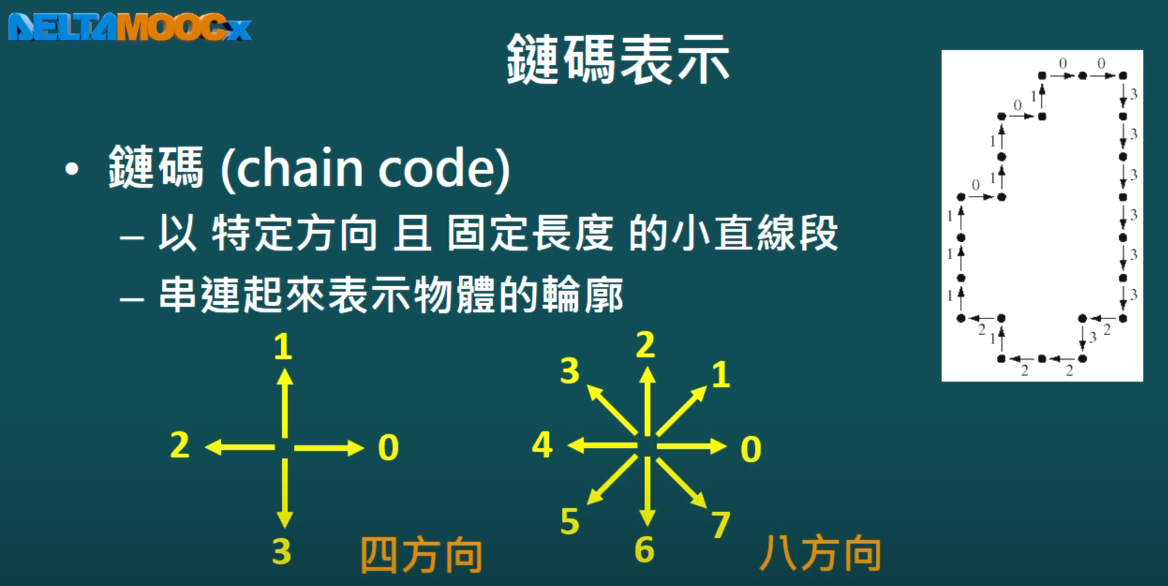
- 步驟
- 根據鏈碼的長度,在物件輪 廓的平面上劃分網格
- 選取離輪廓較近的網格端點
- 選擇一個端點為起始點
- 順時鐘方向將相鄰的端點連 結、編碼成方向碼
- 如何使鏈碼表示式與起始點、 物件大小、物件方向無關
- 與起始點無關 將鏈碼字串視為一個整數,循環 鏈碼,取最小整數來決定起始點
- 與物件大小無關: 網格大小是隨著物件的大小而改變
- 與物件方向無關: 將方向碼改成為相對方向碼,以目前的方向碼減前一個方向碼
- 外形表示(boundaryrepresentation)
-
數位影像處理_黃正民_單元六 影像表示與描述_Part 3 影像物件的外形表示(中)
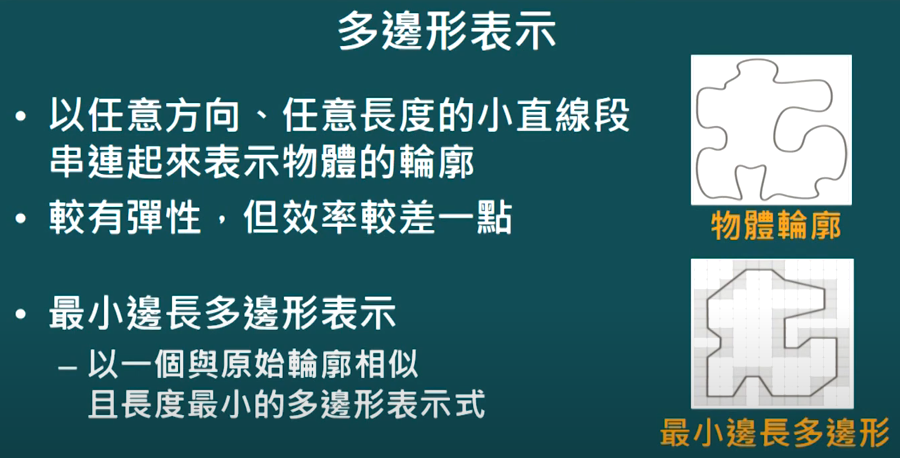
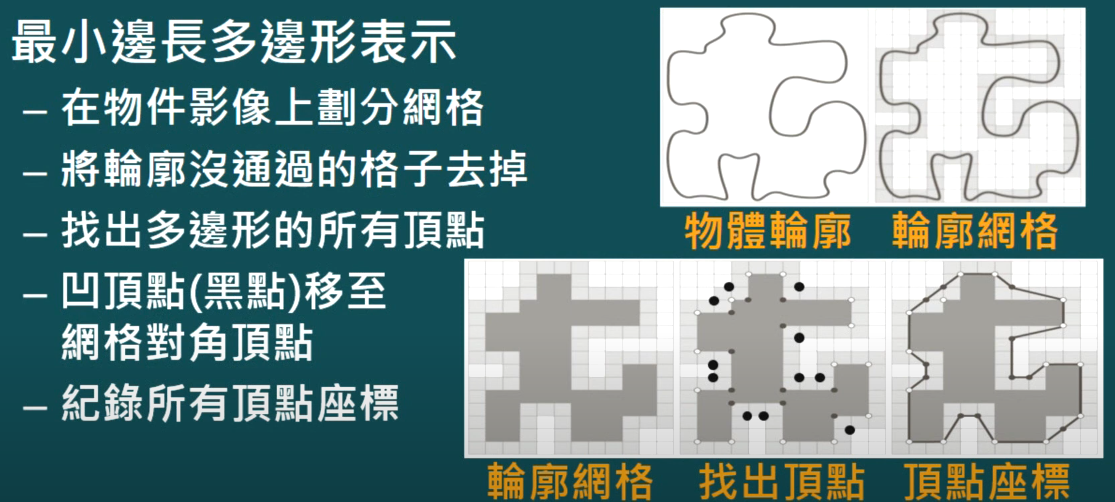
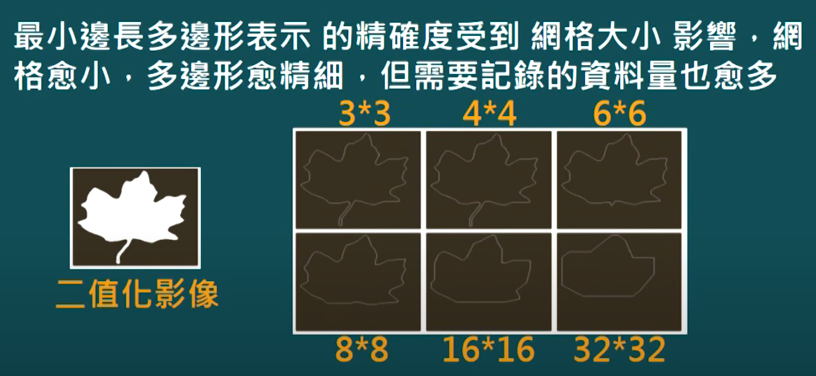
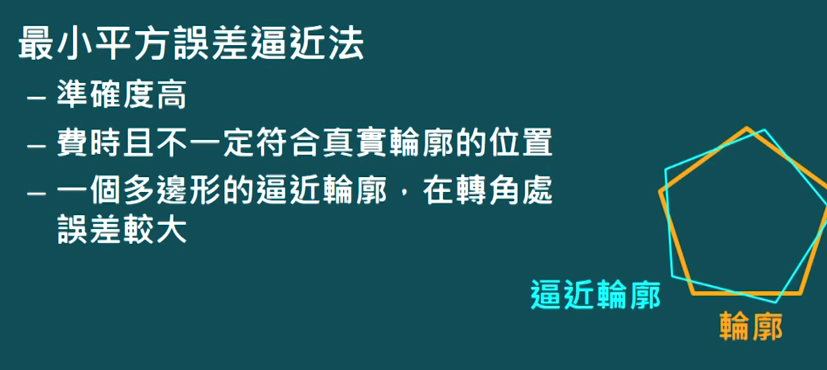
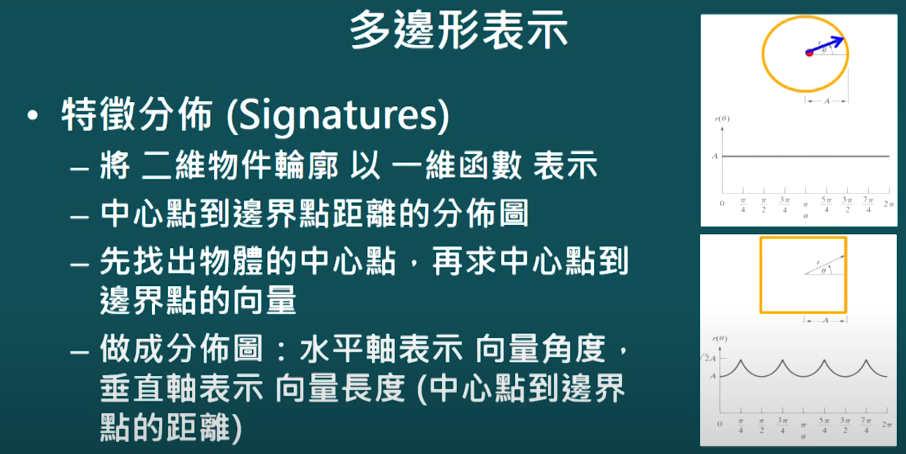
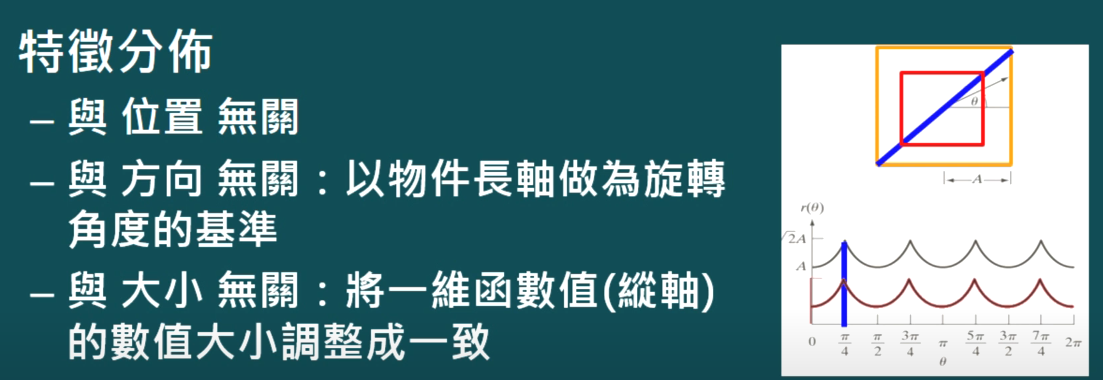
- 多邊形表示
- 多邊形表示
-
數位影像處理_黃正民_單元六 影像表示與描述_Part 4 影像物件的外形表示(下)
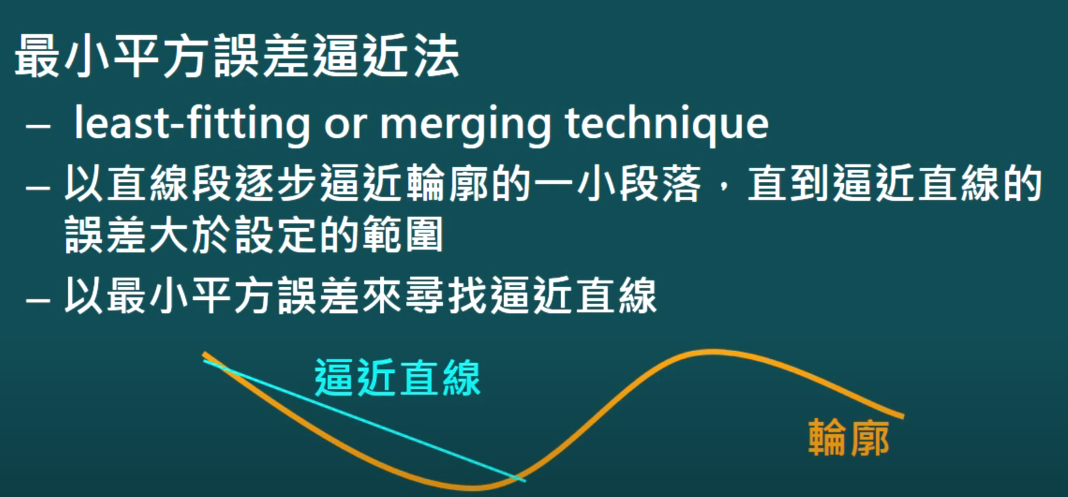
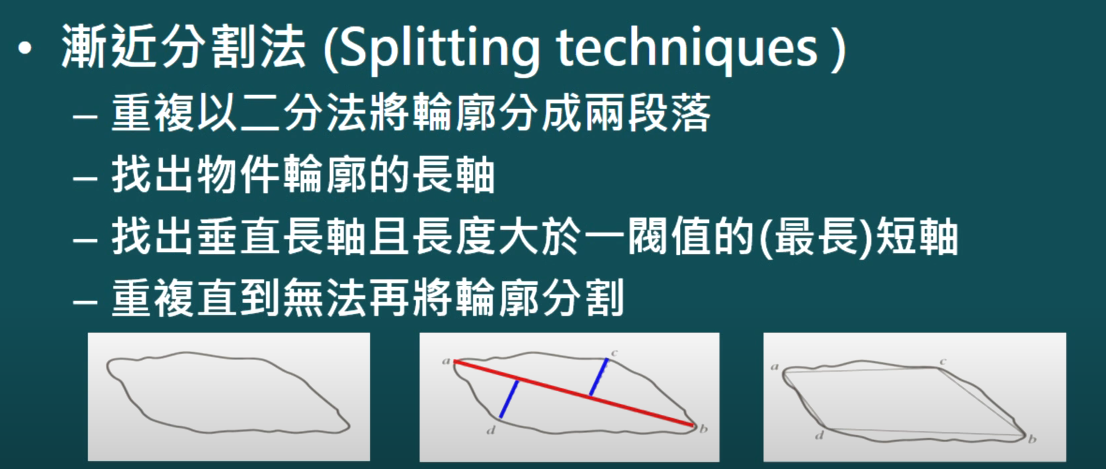
- 漸進分割法
- 漸進分割法
-
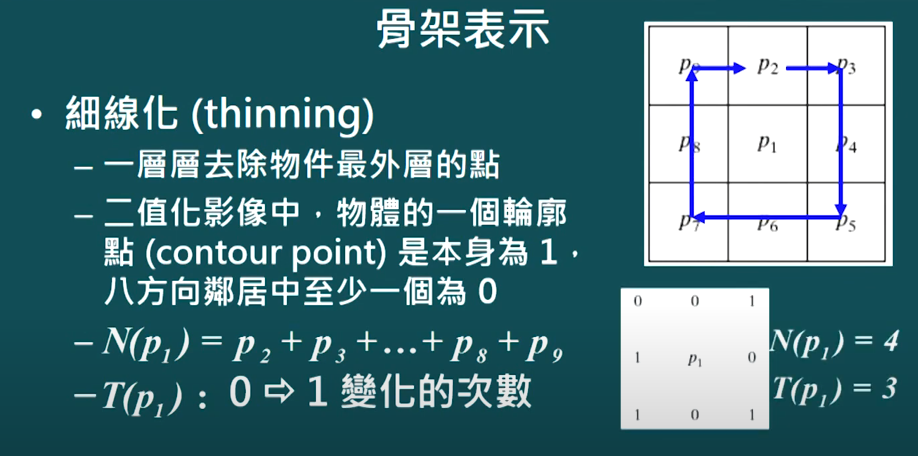
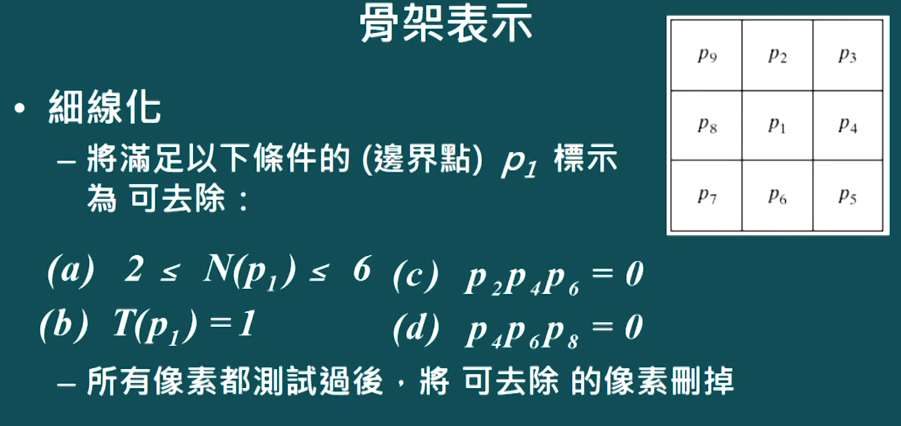
數位影像處理_黃正民_單元六 影像表示與描述_Part 5 影像物件的骨架表示
-
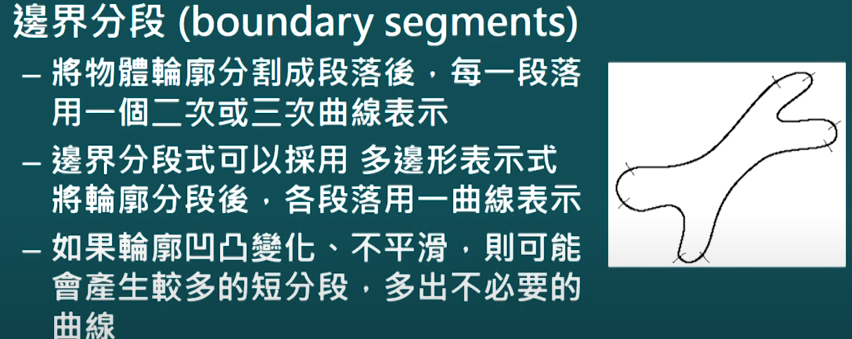
數位影像處理_黃正民_單元六 影像表示與描述_Part 6 影像物件的邊界描述
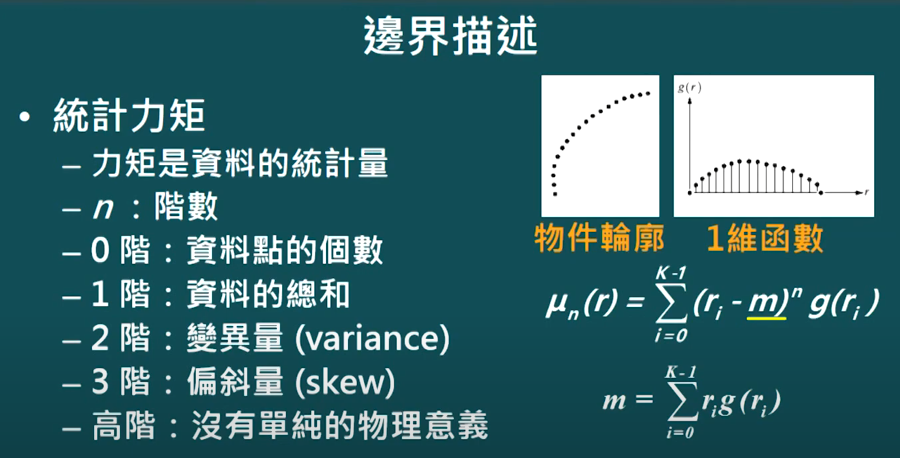
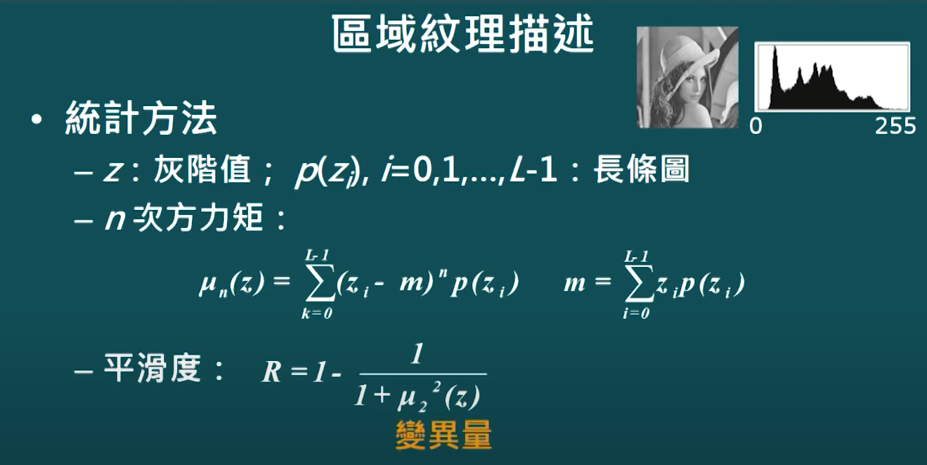
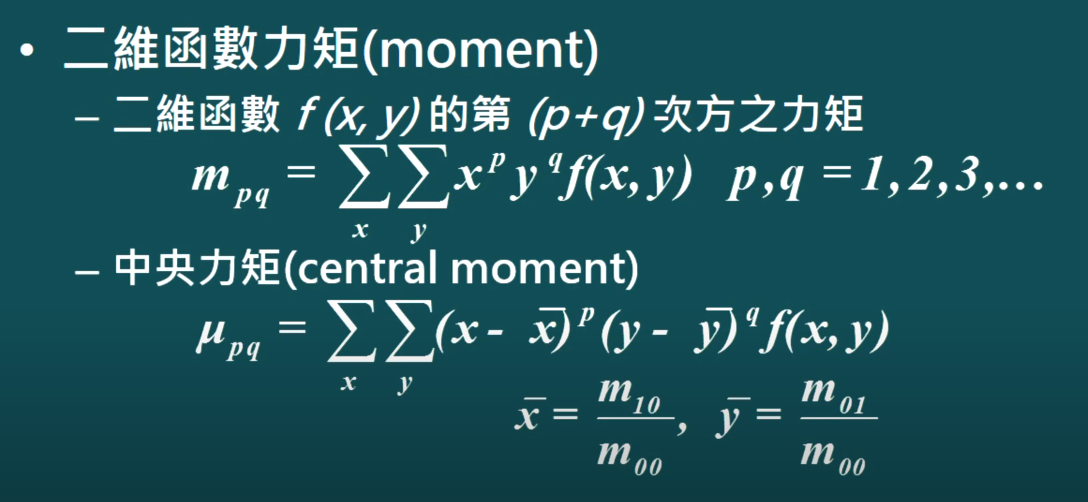
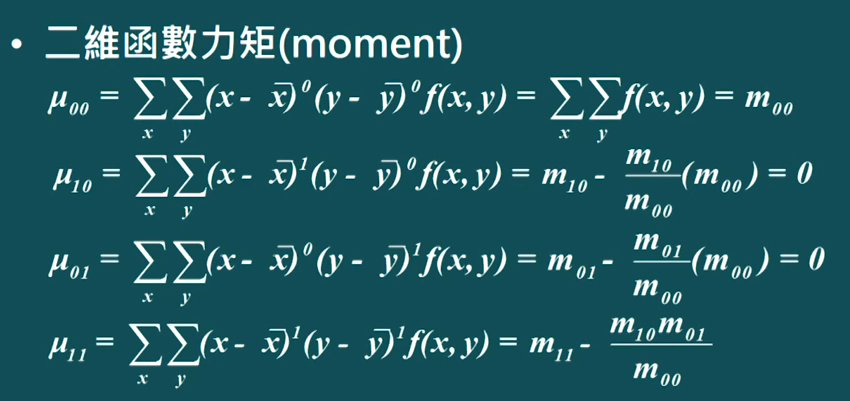
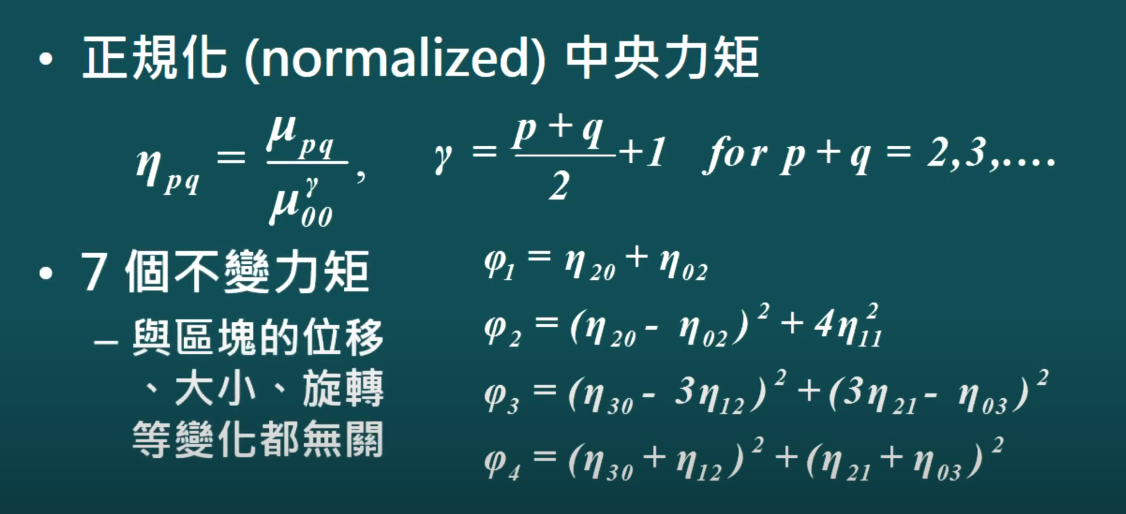
- 統計力矩(statisticalmoments)
- 力矩是資料的統計量
- 0階:資料點的個數
- 1階:資料的總和
- 2階:變異量(variance)
- 3階:偏斜量(skew)
- 高階:沒有單純的物理意義
-
數位影像處理_黃正民_單元六 影像表示與描述_Part 7 影像物件的區域描述(上)
- 區域描述
- 描述區塊內部的影像特徵
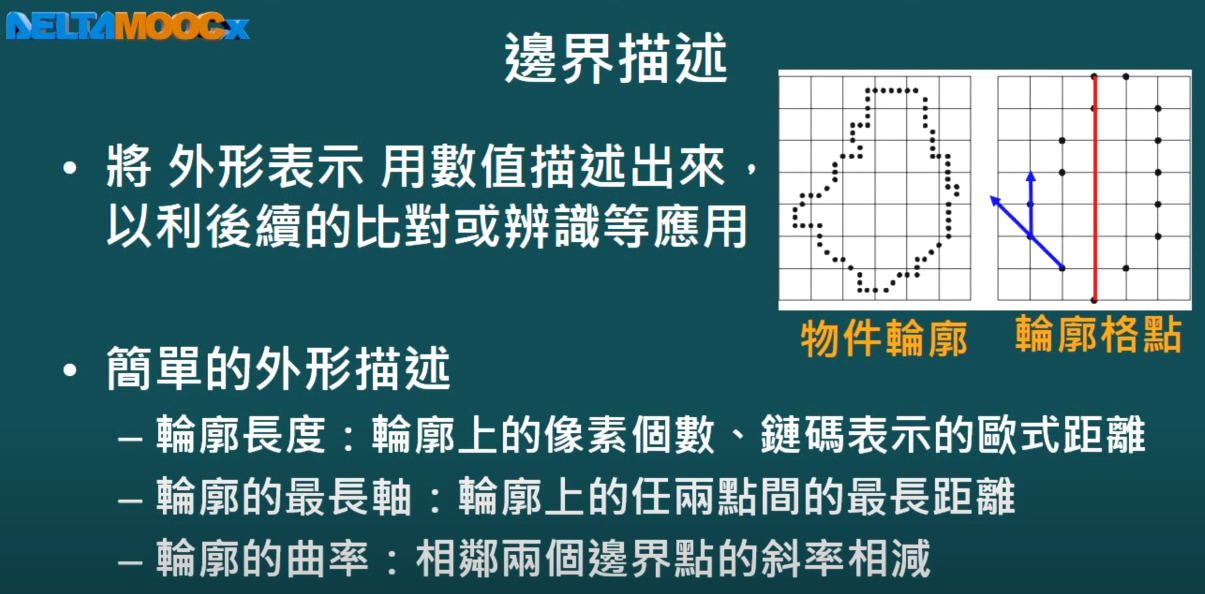
- 簡單的區域描述
- 面積(area):封閉輪廓內的像素個數
- 周長(perimeter):封閉輪廓上的像素個數
- 緊湊性(compactness)·周長2/面積
- 主軸(principalaxes):物體分佈最廣的方向
- 區域內灰階平均值、中間值、最大值、最小值等
- 例子

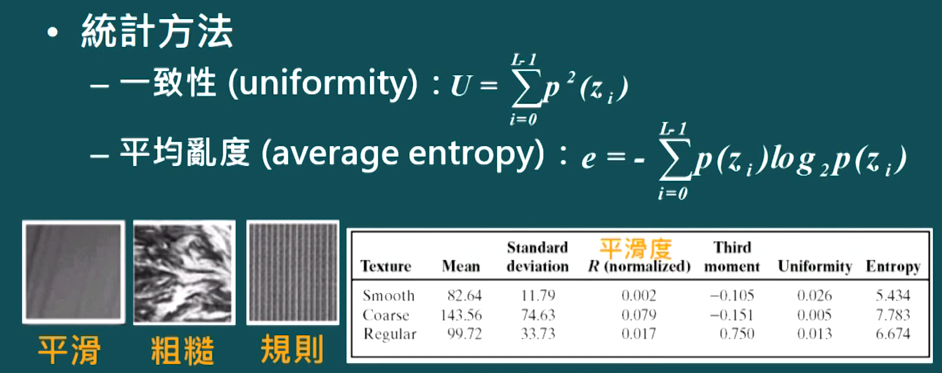
- 區域描述
-
數位影像處理_黃正民_單元六 影像表示與描述_Part 8 影像物件的區域描述(下)
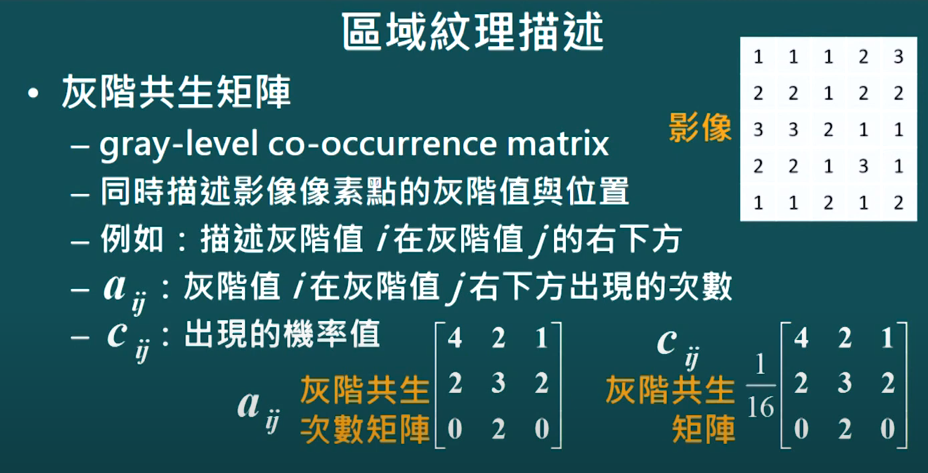
- 灰階共生矩陣的描述
- 最大機率值:最可能的像素相對位置關係
- k次方的差值力矩(elrment difference moment of order k):灰階共生矩陣中,數值高的元素是否集中 在對角線附近
- 亂度:共生矩陣的元素數值愈相近,亂度值愈大,影 像中灰階值分佈越凌亂
- 例子
-
數位影像處理_黃正民_單元六 影像表示與描述_Part 9 影像特徵的描述與比對(上)
- 三角才是,其他不是


-
數位影像處理_黃正民_單元六 影像表示與描述_Part 10 影像特徵的描述與比對(中)
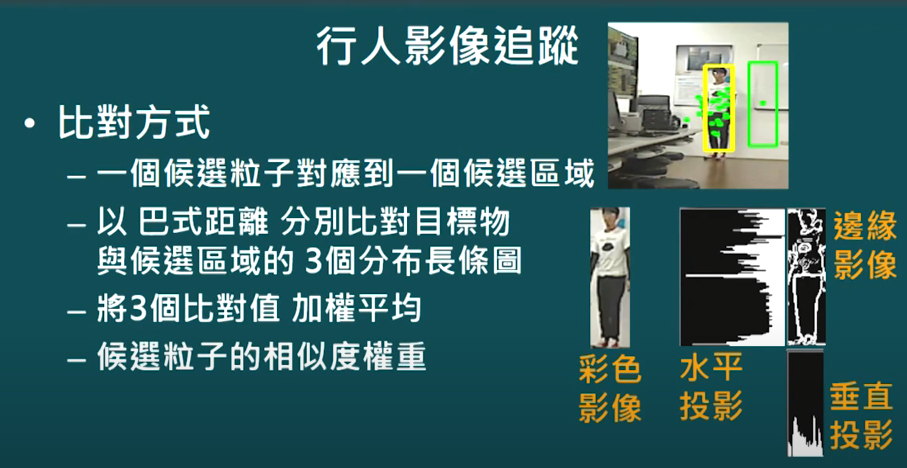
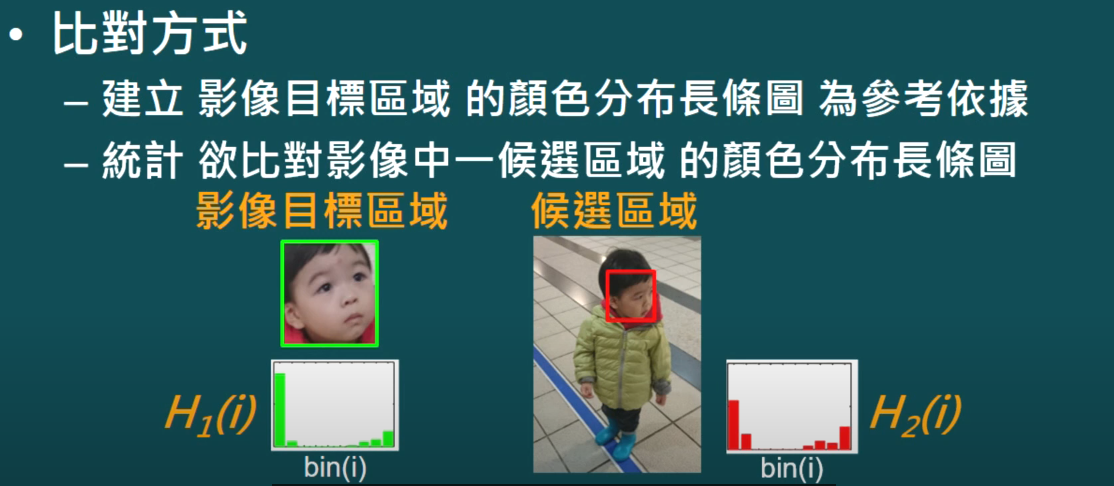
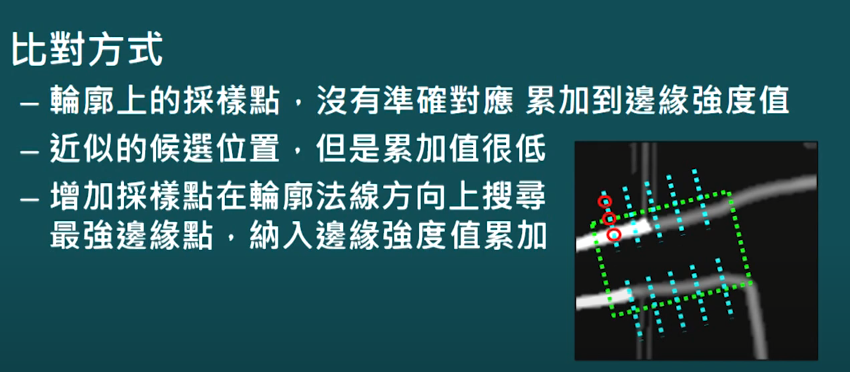
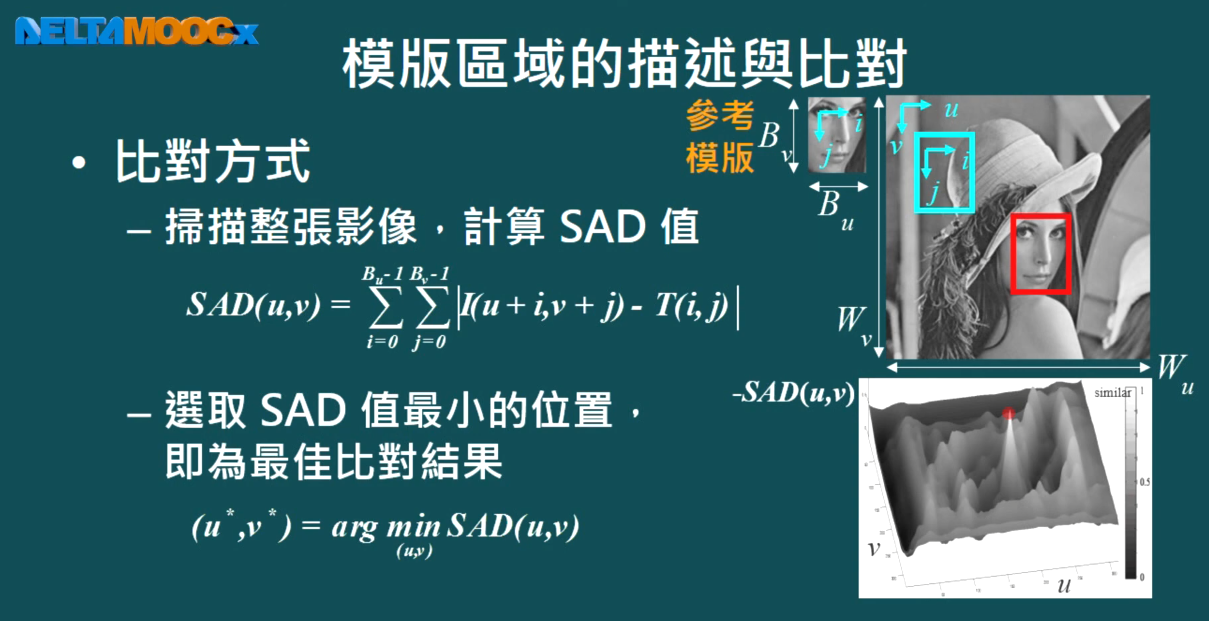
- 比對方式
- 掃描影像中的各個區域,分別做為候選區域
- 計算各候選區域的累加邊緣強度值
- 選出最大值者·即為比對結果

-
數位影像處理_黃正民_單元六 影像表示與描述_Part 11 影像特徵的描述與比對(下)
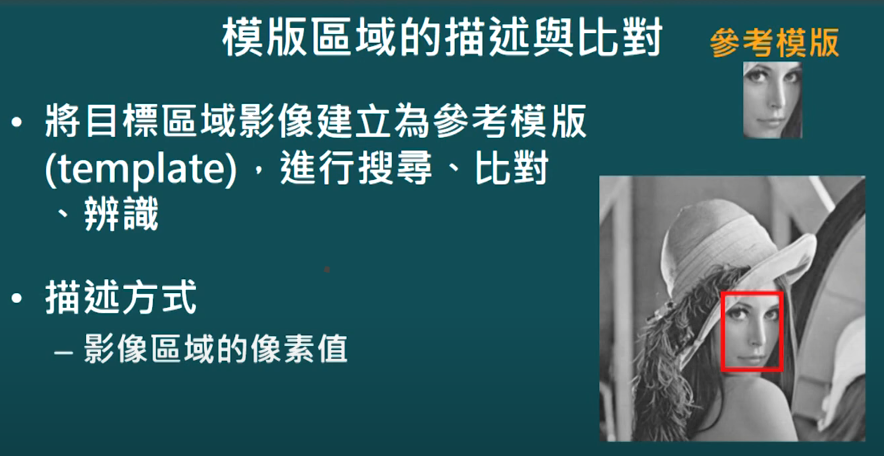
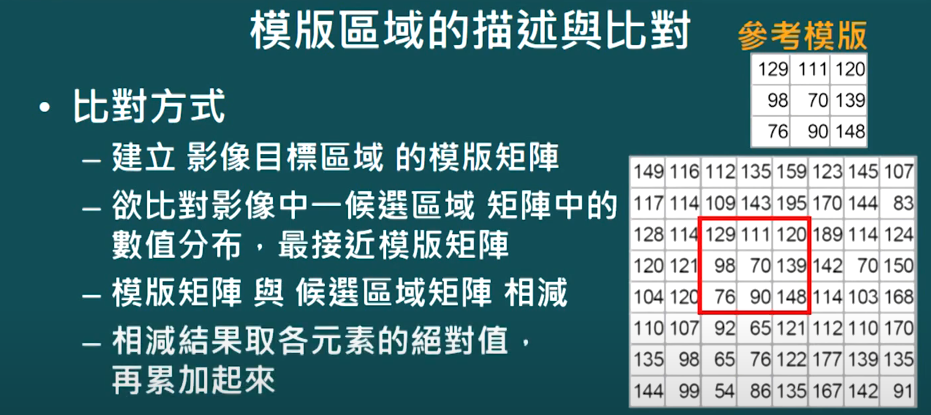
- SAD
-
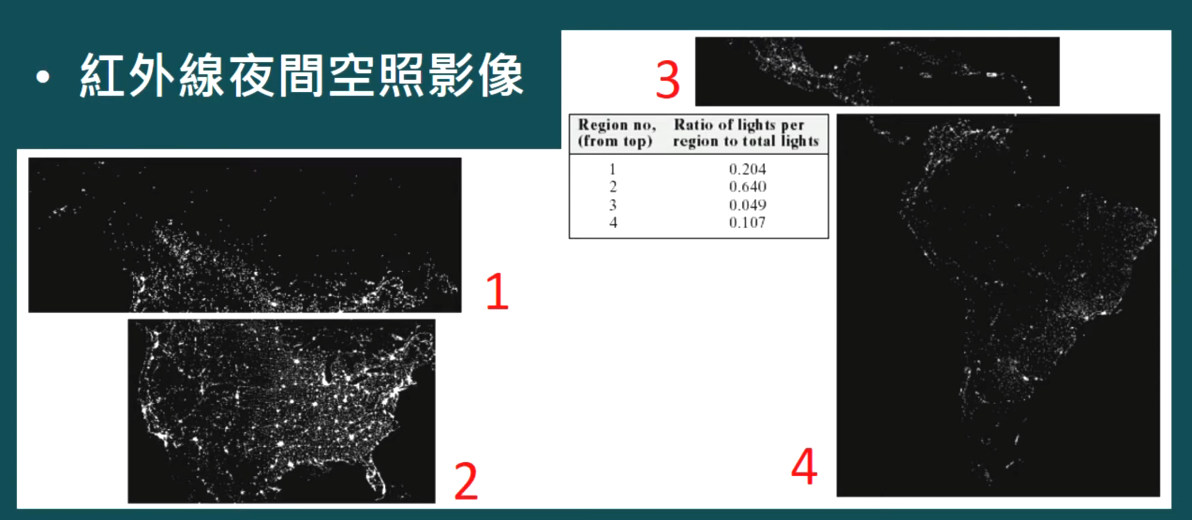
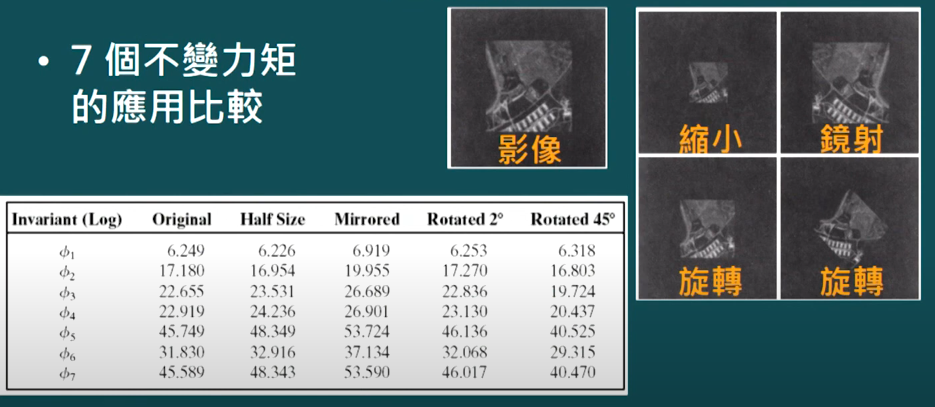
數位影像處理_黃正民_單元六 影像表示與描述_Part 12 影像表示與描述的應用