-
基本資訊
- 作者: 許志明
-
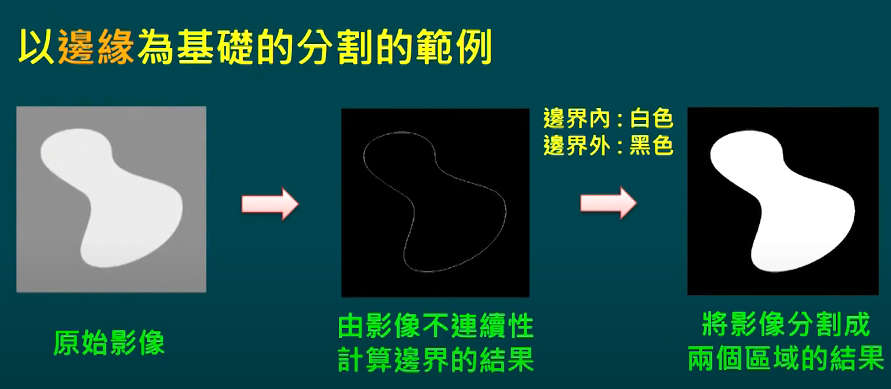
- 分割:將一張影像細分成它的構成的區域或物體
- 細分的程度:依要解決的問題決定
- 分割何時停止:感興趣的物體或區域被偵測出來
- 分割演算法是處理像素強度值的兩個特性
- 不連續性:根據強度的突然改變(像是邊緣)來分割影像
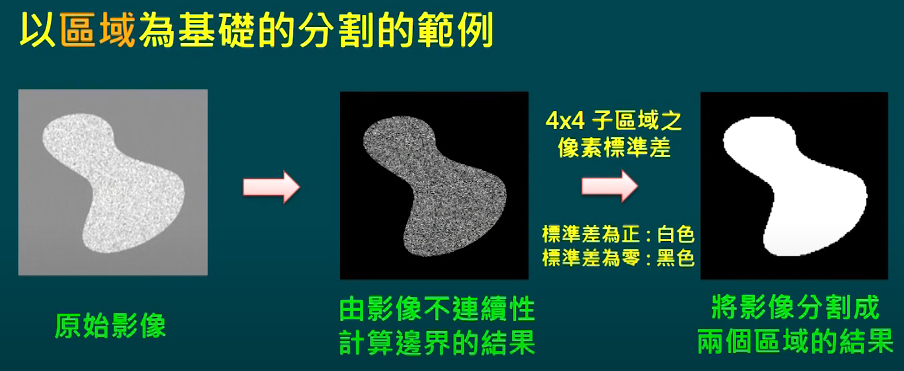
- 相似性:根據一組預先定義的準則,將一張影像分割 成有相似特性的區域
- 假設R是整個影像區域
- 將R劃分成幾個子區域R_1, R_2, …R_n
- 所有R的集合必須包含圖上每個像素
- 將R劃分成個子區域R_1, R_2, …R_n 且必須符合下列條件
- 區域中的點必須相連通
- 各子區域互不相交
- 在分割區域的像素都必須滿足的性質
- 相鄰區域性質需不同
-
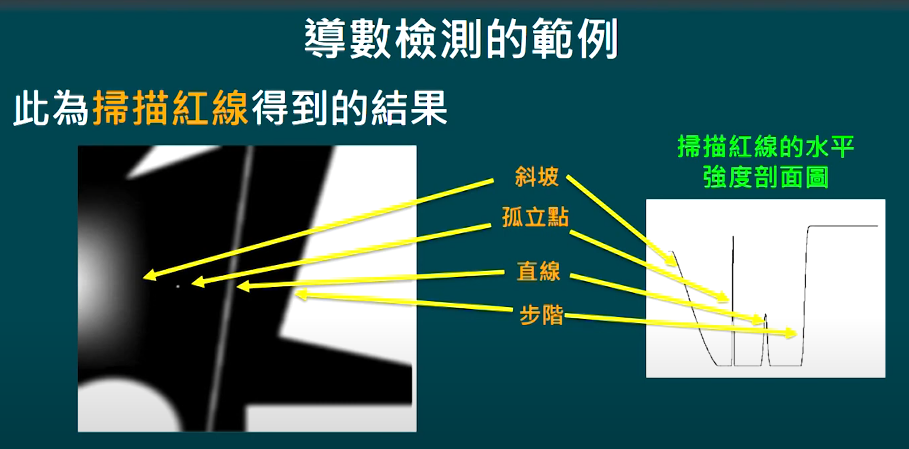
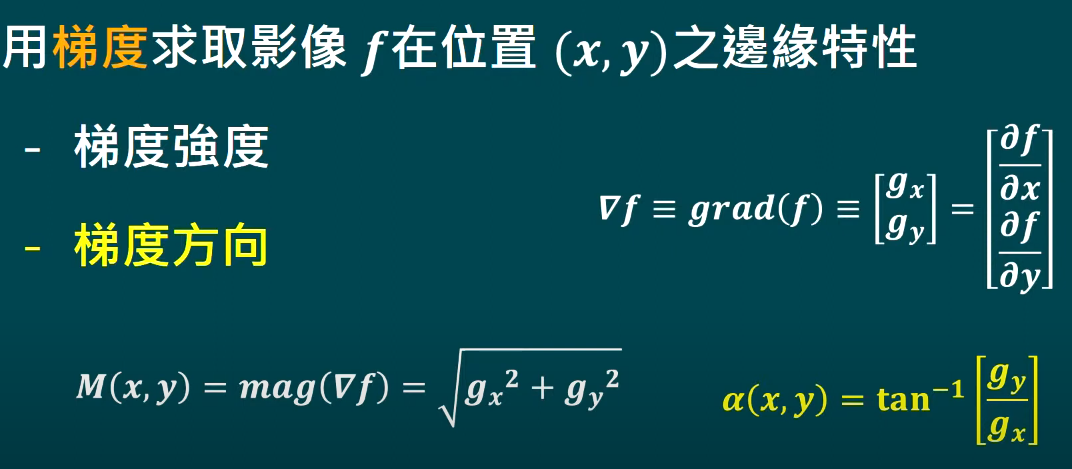
- 一階導數
- 漸層部分是一個厚度的等高區域
- 孤立點的位置一階導數有明顯的跳躍值
- 在一個較不明顯的邊緣偵測上,一階導數會來的優秀
- 二階導數
- 較厚邊緣只有在變化起點和終點有值
- 在孤立點·或是較明顯的邊緣來說,二階導數 較為敏感,響應較大
- 此種特性會同時加強雜訊訊號
- 孤立點或是精緻邊緣有正負值的變化
- 由正負值的變化可推測此邊緣特徵
- 由深色邊到淺色邊(正值的二階導數)
- 從淺色邊到深色邊(負值的二階導數)
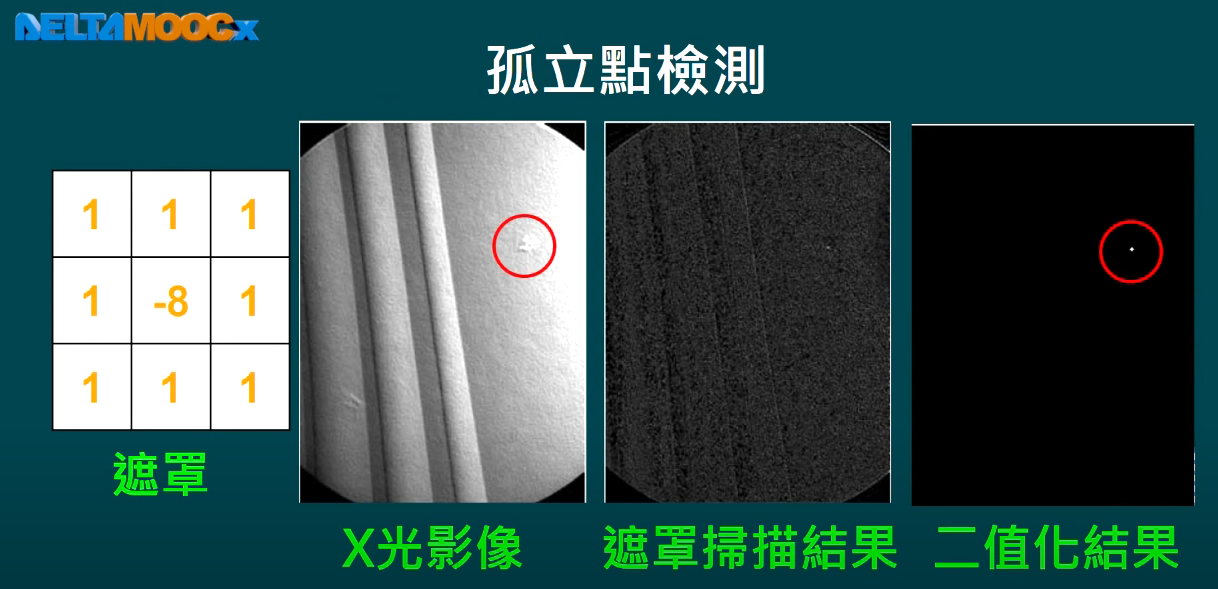
- 孤立點檢測
- 以拉普拉斯檢測器為主,因為拉普拉思具有等向性
- 線檢測
- 可以預期二階拉普拉斯會有強烈響應
- 產生比一階導數所得更細的線
- 電子電路用之打線遮罩影像例子
- 取拉普拉斯之後放大檢視正負線效應
- 可用絕對值解決正負值問題
- 只取正值解決厚度加寬問題
- 若檢測目標為特定方向的線,則不採用拉普拉斯,採用有方向性的遮罩
-
- 邊緣模型依照強度輪廓分類共分三種
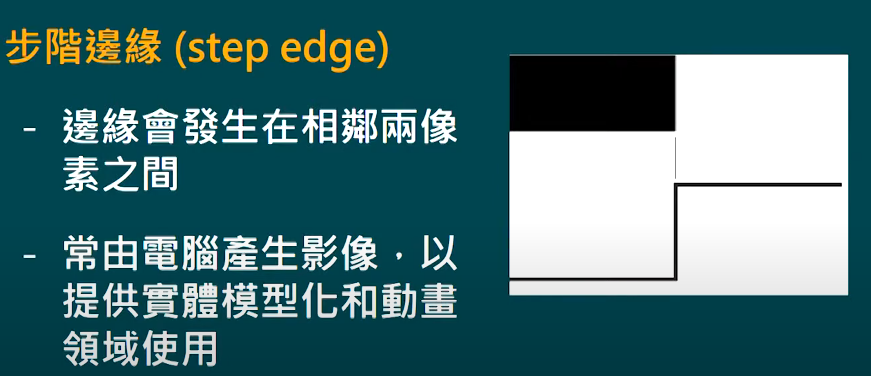
- 步階邊緣(step edge)
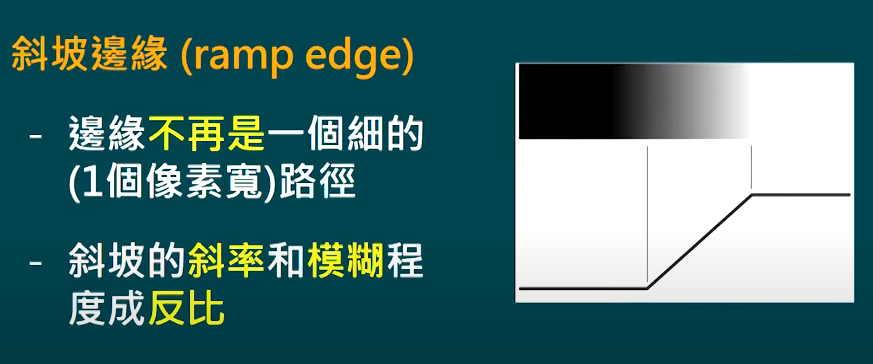
- 斜坡邊緣(ramp edge)
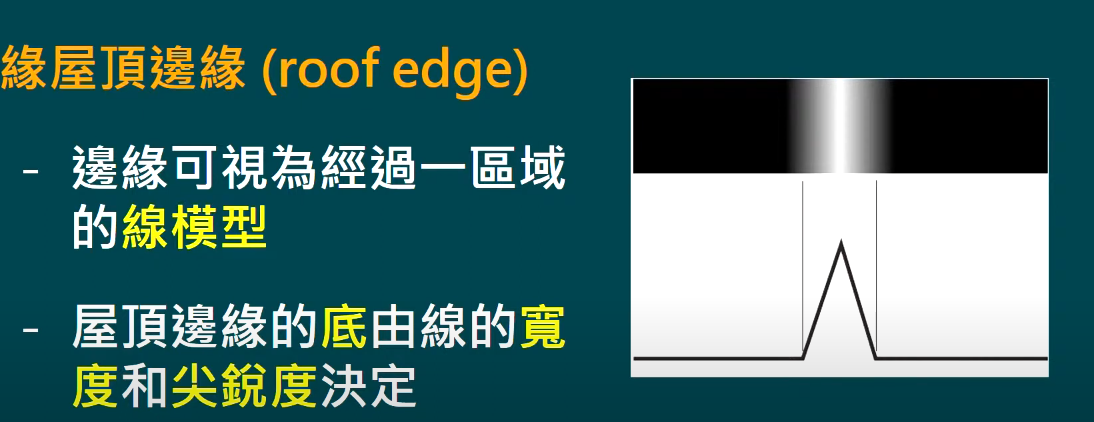
- 屋頂邊緣(roof edge)
- 步階邊緣(step edge)
- 水平垂直可以用一維遮罩
- 有角度的就一定要二維
- 常用遮罩
- Prewitt
- 做相鄰兩行列的差值
- Sobel
- 做相鄰兩行列的差值,且相鄰中心較Prewitt重
- Prewitt
- 邊緣模型依照強度輪廓分類共分三種
-
- 比前述邊緣檢測都要好
- 基於三種基本目標
- 低錯誤率
- 所有邊緣都應被偵測到
- 邊緣點應有好的局部性
- 找到的邊緣盡可能接近
- 單一邊緣點響應
- 對一真實邊緣應該只檢測出一個點
- 低錯誤率
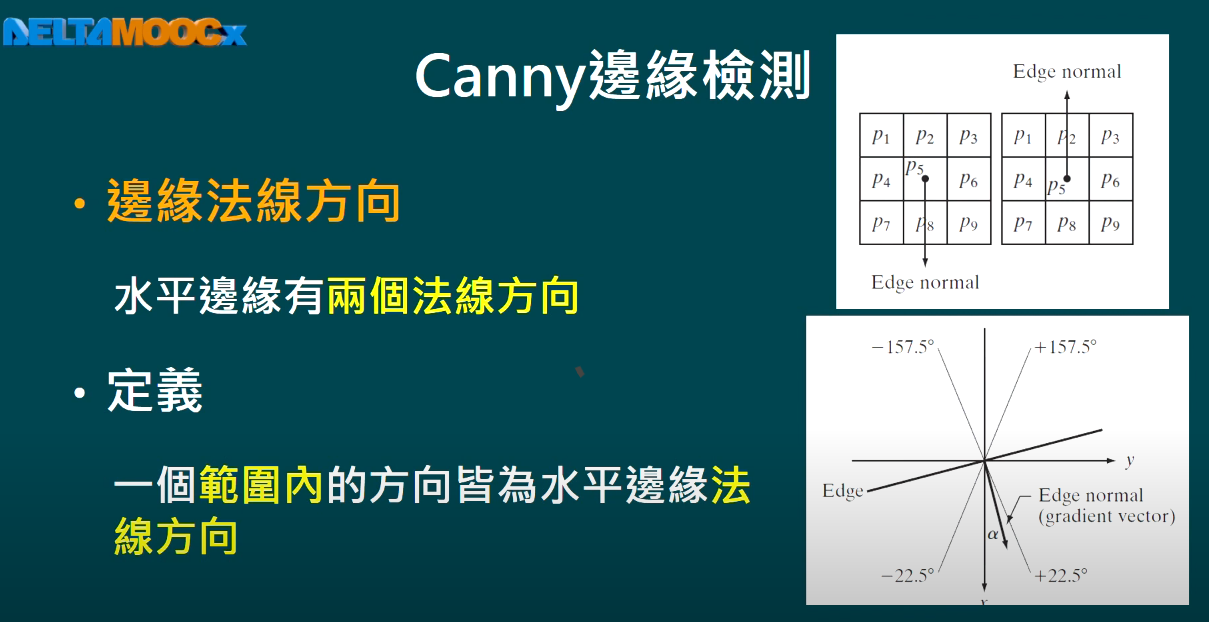
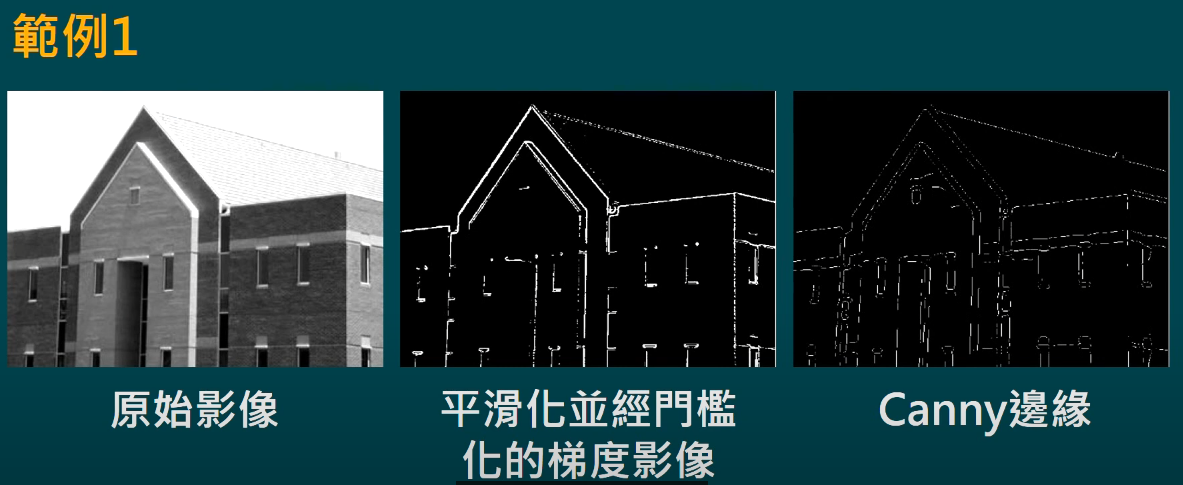
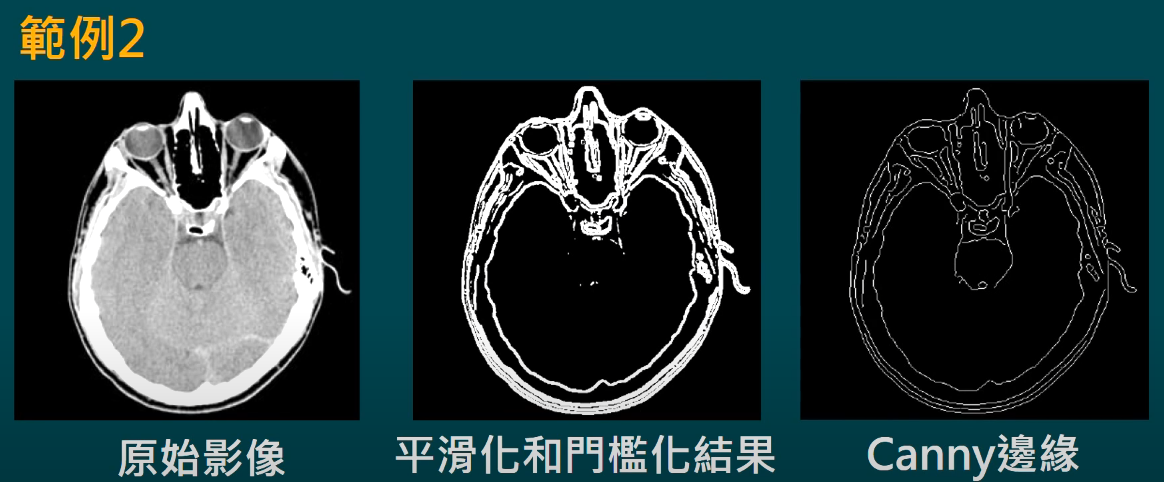
- Canny邊緣檢測 四步驟
- 高斯濾波 → 計算梯度大小、角度 → 非最大值抑制 → 雙門檻化
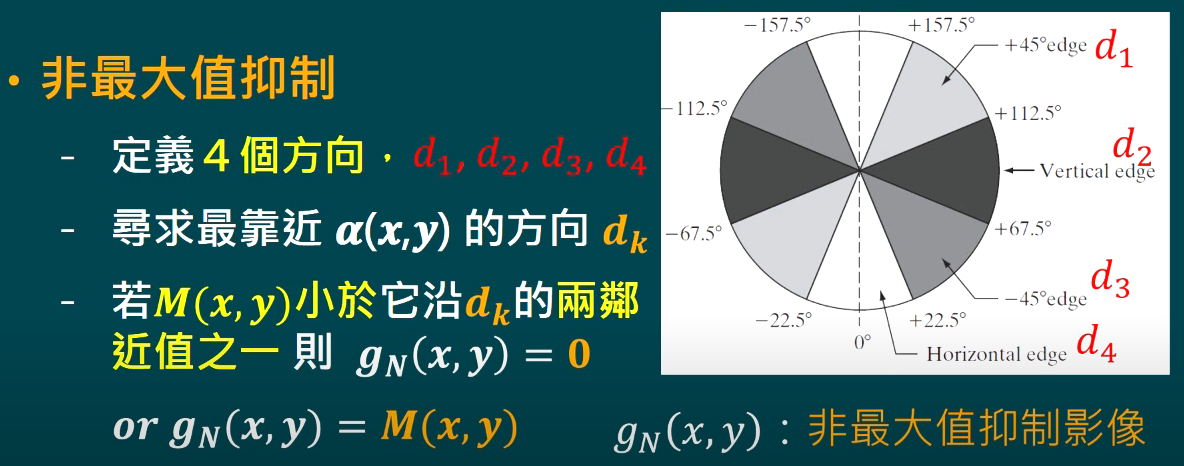
- 非最大值抑制影像g_n為邊緣細化之後的影像
- 取門檻值以減少假邊緣
- 門檻太低仍會有假邊緣
- 門檻太高則有真邊緣被消除
- 因此Canny演算法採用遲滯門檻化解決此問題
-
- 邊緣連接的緣由
- 理想情況:邊緣檢測應只發生在邊緣上之像素集合
- 實際情況:因為雜訊,引入不均勻照明的破碎邊緣, 使得這些像素很少能完整的表示邊緣
- 需要設計將邊緣像素連接成有意義邊緣或區域邊界的 連接演算法
- 三種基本的連接方法
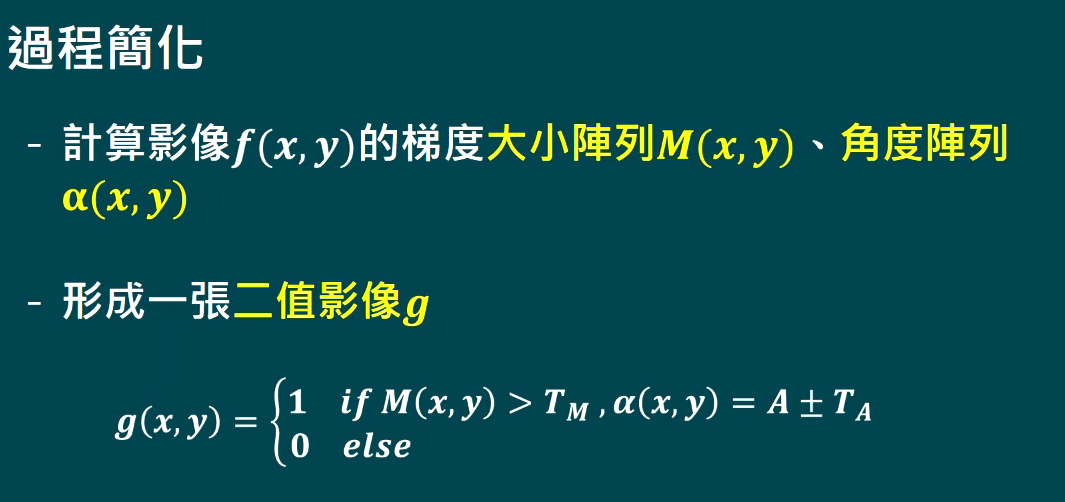
- 局部性處理
- 分析已被宣為邊緣點的鄰域像素特性
- 如梯度大小、方向等等
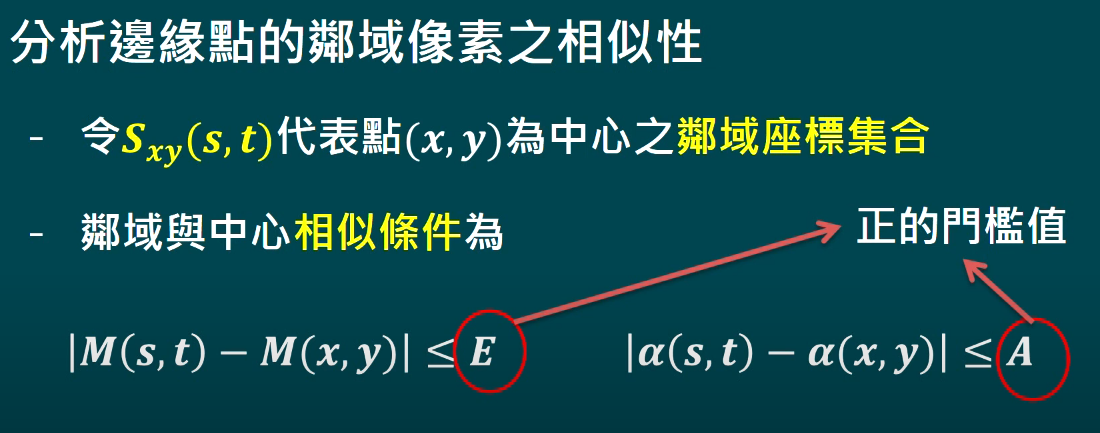
- 假如梯度大小、方向的相似準則皆滿足條件
- 將(s,t)和(x,y)相連接 重複以上步驟,掃描整張影像
- 缺點:需要耗費相當大的計算
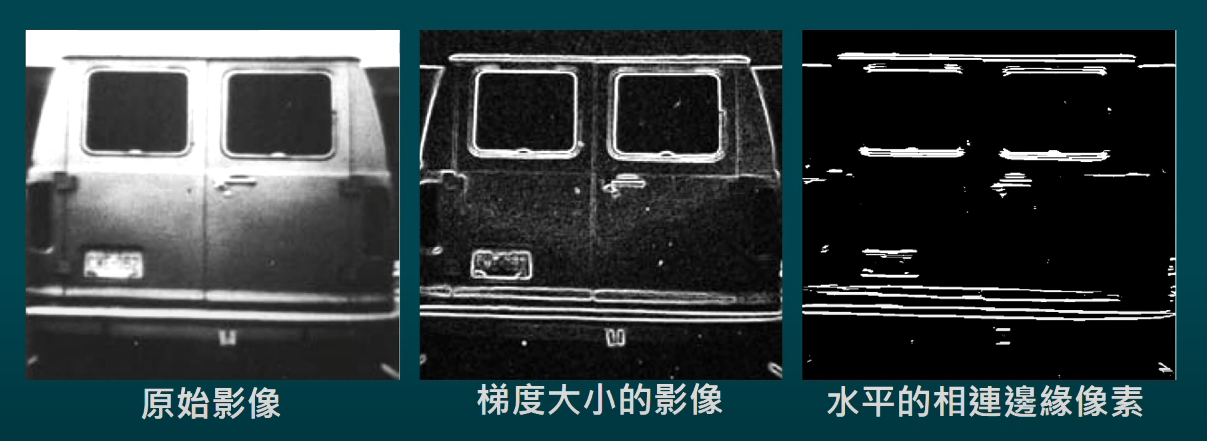
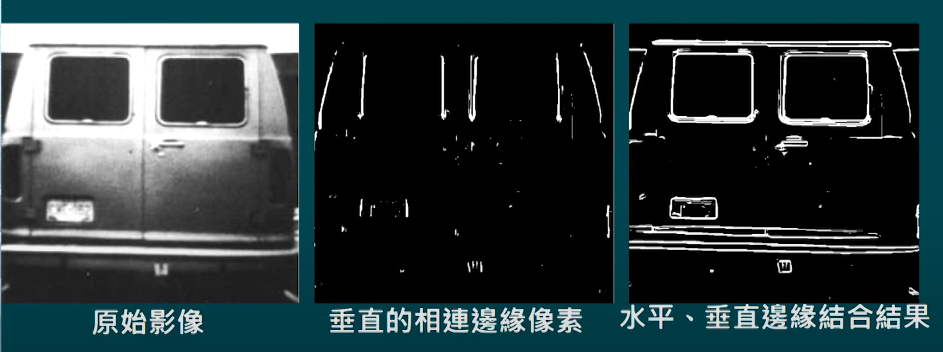
- 掃描影像g的每一列,若空隙長度小於k,則將空隙填滿
- 若要檢查其他方向空隙則將影像旋轉sita角,處理結束,再旋轉回來
- 例子: 車子影像
- 分析已被宣為邊緣點的鄰域像素特性
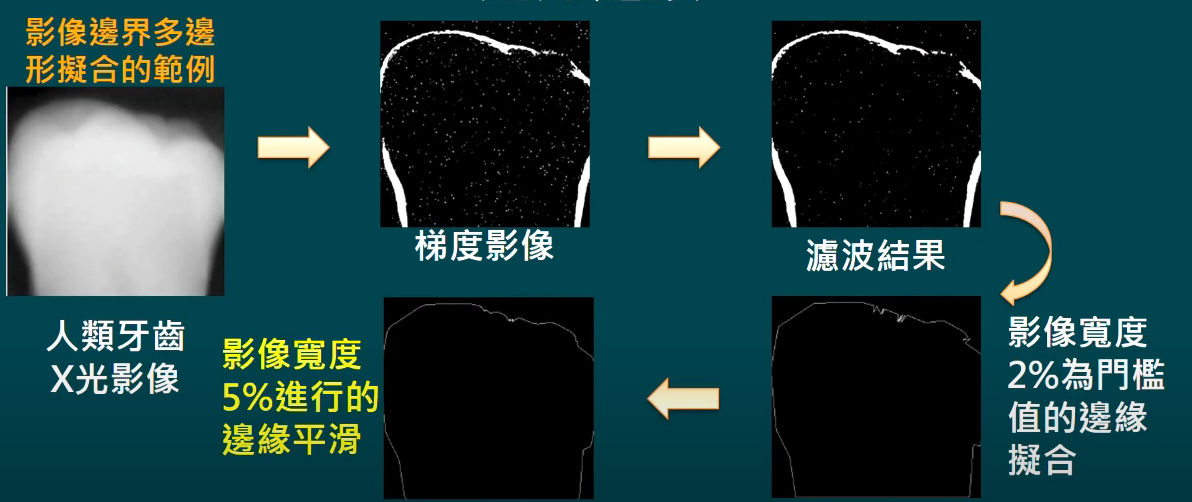
- 區域性處理
- 感興趣區域是已知或可被求得的
- 以區域為基礎連結像素
- 結果為區域邊界的近似
- 例子: 牙齒X光影像
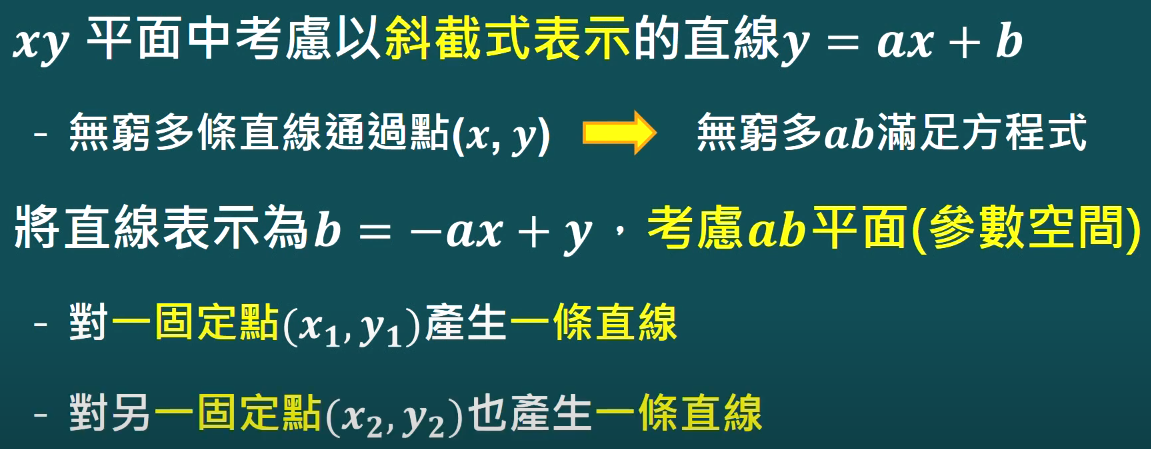
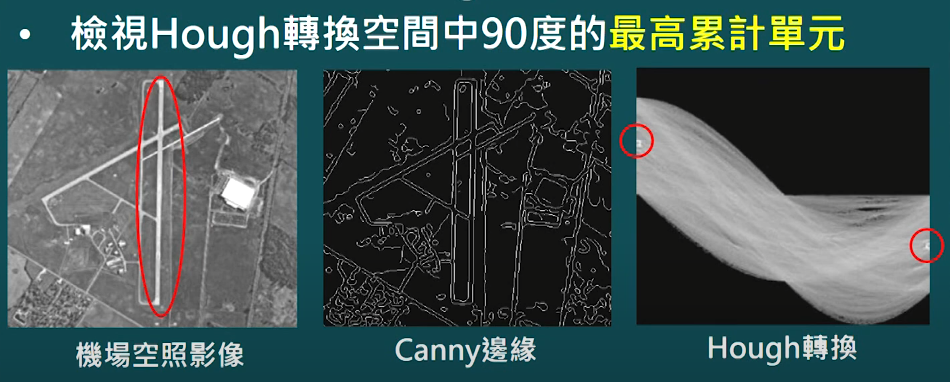
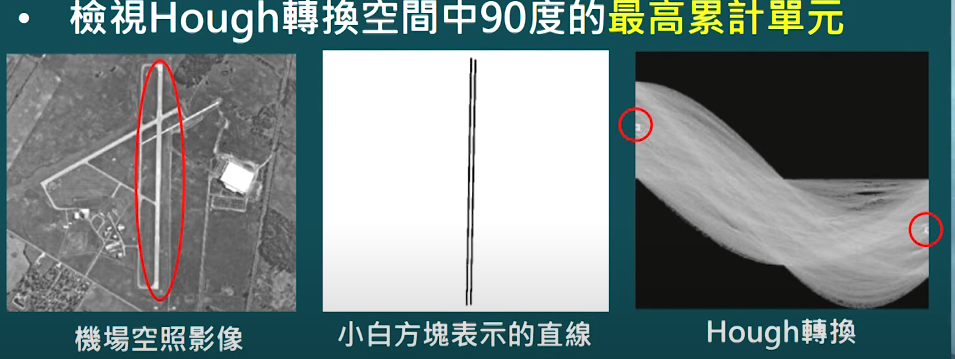
- 整體處理(Hough轉換)
- 局部性處理
- 邊緣連接的緣由
-
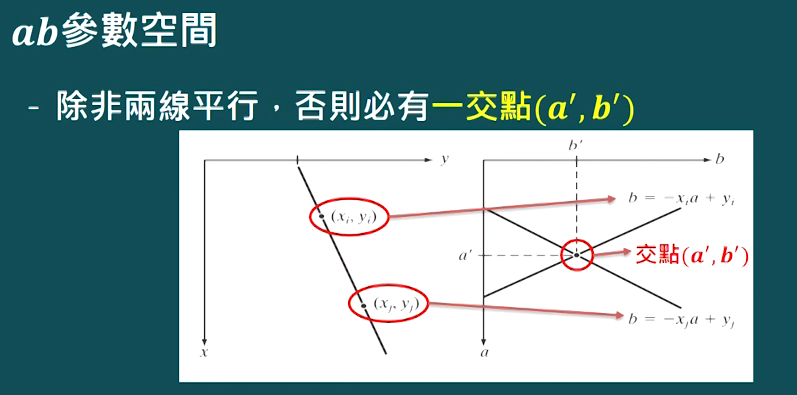
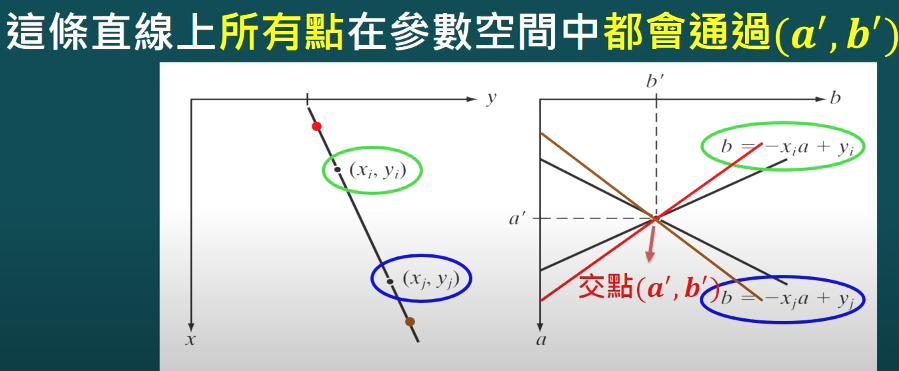
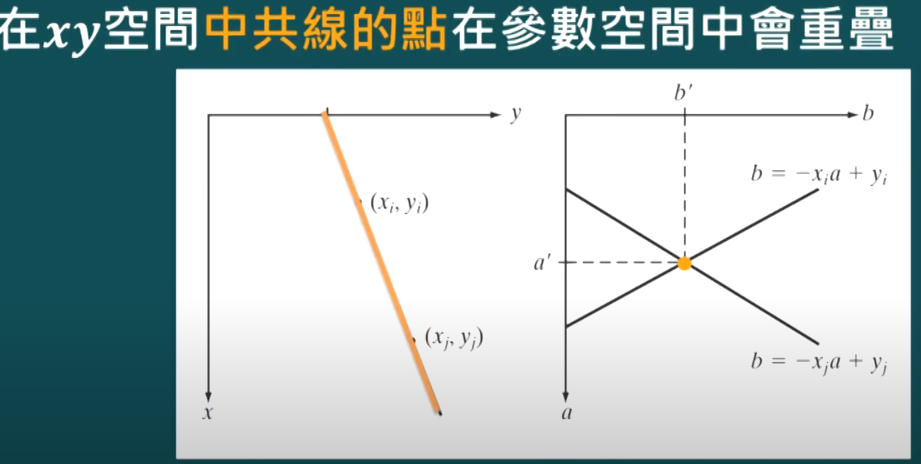
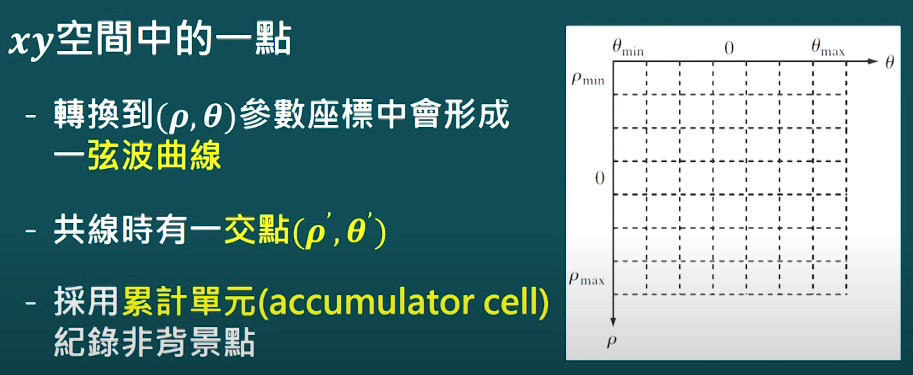
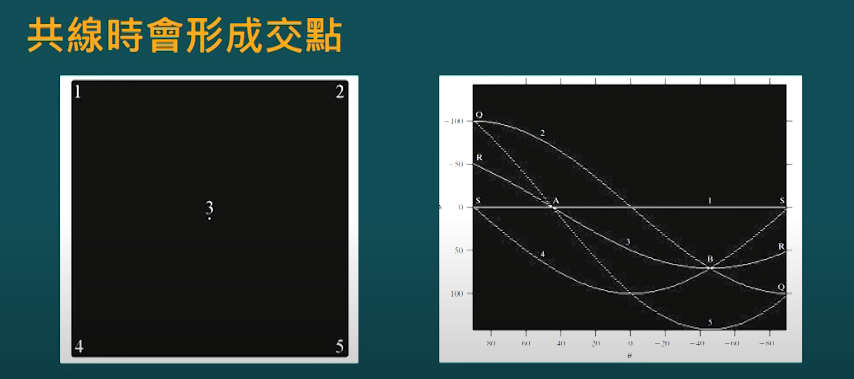
- 整體處理(Hough轉換)
- 前提
- 不確定感興趣區域會在哪裡
- 所有像素都是可能連接候選者
- 定義整體性質以連接或是消除像素
- 理論
- 例子
- 例子
- 前提
- 整體處理(Hough轉換)