原作者
原投影片作者: 陳金聖 台北科技大學自動化科技研究所教授
- 影像匹配_影像匹配介紹
- 影像匹配用途
- 影像檢索
- 物件取放
- 尺寸量測
- 字元辨識(OCR),字元確認(OCV)
- 影像匹配目標
- 即時性
- 強健性
- 精度
- 影像匹配用途
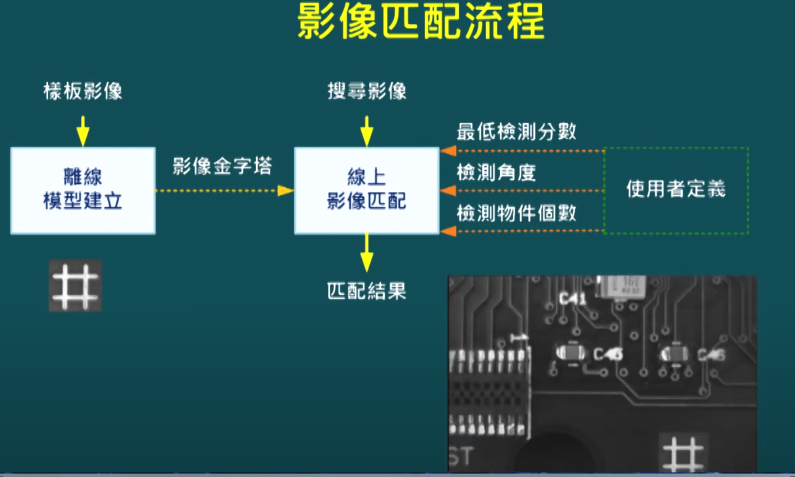
- 影像匹配_模板匹配
- 將目標區域影像建立為參考模版(template)·進行搜尋、比對、辨識
- 描述方式
- 影像區域的像素值
- 二維矩陣
- 比對方式
- 建立影像目標區域的模版矩陣
- 求出欲比對影像中候選區域矩陣中的數值分布找出最接近模版矩陣的位置
- SAD(Sum of AbsoIute Difference)
- NCC(Normalizedcross correlation)
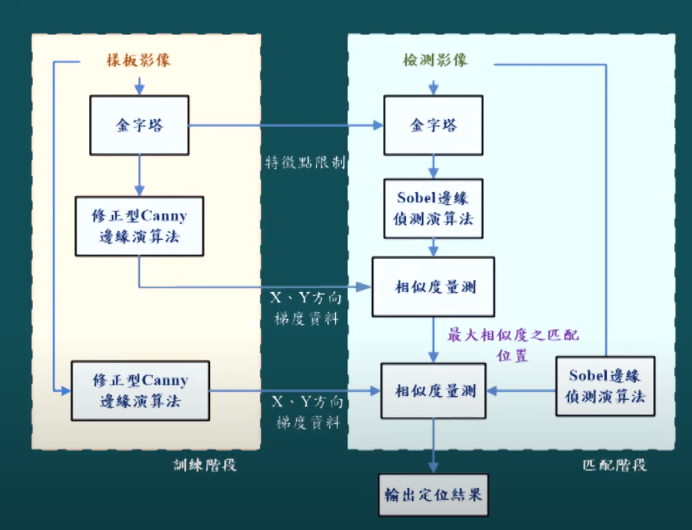
- Shape-based matching (SBM)
- 基於梯度向量積之物件匹配流程
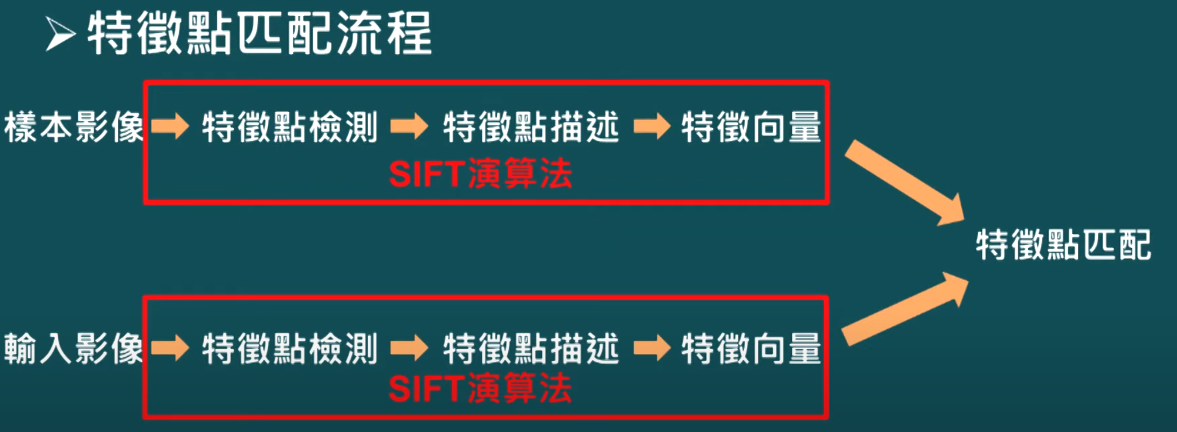
- 影像匹配_點特徵匹配(1)
- 何謂特徵點(Feature Point)
- 對同一個物體在不同視角下所得的兩張影像中有相同的像素點對應到物體上的同一個點且有相同的特徵描述,我們稱此像素點為特徵點。
- 特徵點特性
- 可以重複偵測(Repeatable)出現在影像相同區域的像素點
- 具有獨特性(Distinctive)與可靠性(Reliable)
- 具有旋轉(Rotation)與尺度(Scale)不變性(Invariance)
- 角特徵
- 何謂特徵點(Feature Point)
- 影像匹配_點特徵匹配(2)
- 尺度不變特徵轉換SIFT
- 英文全名:ScaIe lnvariant Feature Transform
- 作者:David G. Lowe
- 提出基於尺度空間,對影像縮放、旋轉與仿射變換保持不變性的影像區域特徵描述(Feature Descriptor)運算子
- 尺度不變特徵轉換特色
- 對影像的局部特徵擁有旋轉、尺度、光照保持不變性
- 對視角變化、仿射變換、雜訊保持一定程度的穩定性
- 對目標遮擋與雜物場景的影像,皆能找出特徵點
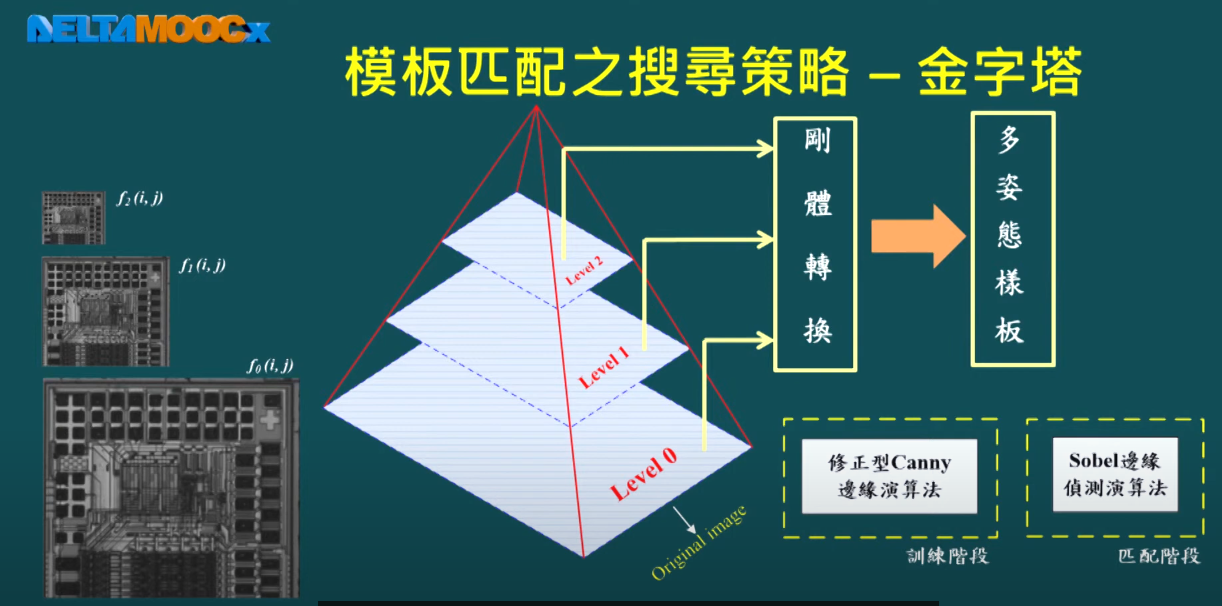
- 為了增加尺度不變性,將影像金字塔改成高斯金字塔
- 高斯金字塔是由多組影像金字塔所構成·每組影像金字塔皆包含若干層
- 每層的影像大小皆相同,但每層的高斯參數皆不同
- 先將原影像擴大2倍·作為第1組高斯金字塔的第1層
- 每組的影像金字塔影像大小,為前一組影像金字塔的影像
- 大小縮小2倍
- 尺度不變特徵轉換SIFT
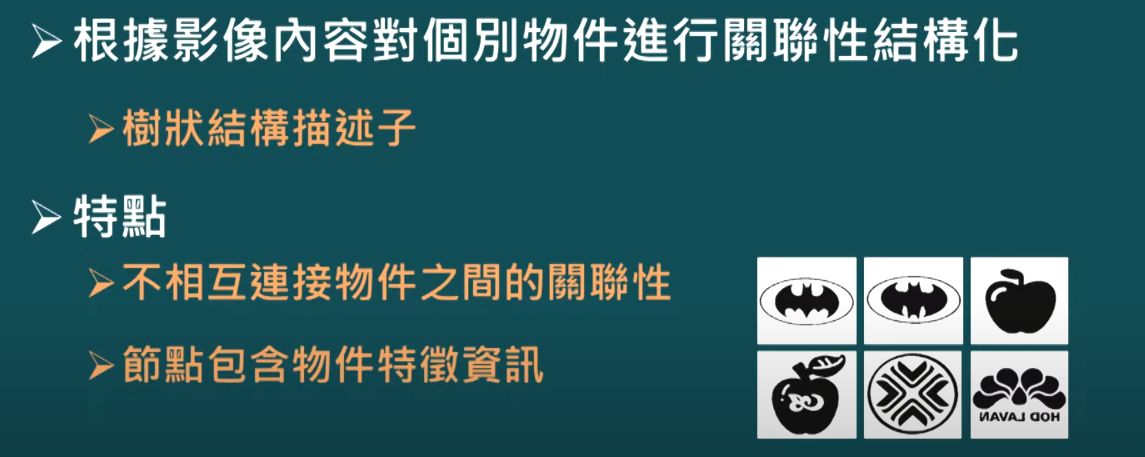
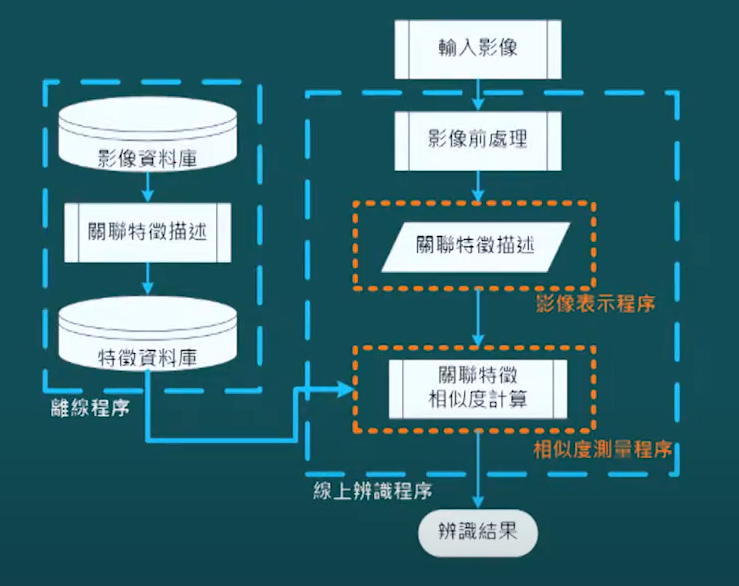
- 影像匹配_關聯特徵匹配